







タカラトミーは、JAXA等と共同開発した超小型の変形型月面ロボット「SORA-Q(ソラキュー)」の変形・走行する様子を公式ウェブサイトにて公開した。
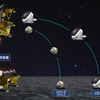
[写真:球体のまま着陸/拡張変形/バタフライ走行/クロール走行]
SORA-Qは直径約80mm、質量約250gの超小型の変形型月面ロボット。JAXAの小型月着陸実証機「SLIM(スリム)」に搭載し、月面でのデータ取得を行う計画。ispace(アイスペース)の月着陸機「HAKUTO-R」による月面輸送と合わせて計2回の月面探査を行う予定だ。
SORA-Qは変形ロボット「トランスフォーマー」をはじめとする、タカラトミーが玩具作りで培ってきた小型化、軽量化の知見と、変形機構に関わる技術を活用して開発。月面に着陸後、瞬時に球体が左右に拡張変形し、外殻を車輪として回転させて月面を走行する。自在に動く両輪は回転軸を偏心させ、「バタフライ走行」と「クロール走行」の2種の走行モードを実現。あらゆる方向に転倒しても正位値に復帰し、平地だけでなく傾斜地も走行できる。
頭部の前後にはカメラを搭載。前方カメラで周囲の状況を、後方カメラでは自らが月面を走行してできた跡、轍(わだち)などを撮影する。撮影したデータはBluetooth通信でLEV-1に送信し、LEV-1を経由して地球へ送られる。なお、送信するデータはSORA-Q自身が画像を判断して選別。SORA-Qが月面へ到着してから画像を送信するまでのミッション実行時間は約1~2時間程度を予定している。
SORA-Qの使命は、月面の低重力環境下における超小型ロボットの探査技術を実証すること。「月面に到達すること」「SLIM探査機から分離して月面に着陸すること」「月面のレゴリス(月の表面を覆う砂)上を走行し、動作ログを取得、保存すること」「着陸機周辺を撮影し、画像を保存すること」「撮影した画像データ、走行ログ、ステータスをSLIM探査機とは独立した通信系で地上に送信すること」の5つのポイントでミッションに挑む。
月面は地球と比べて重力が6分の1であり、またレゴリスに覆われた路面等、地上とは異なる特殊な環境だ。今回のミッションでは、将来の月面における有人自動運転技術および走行技術等の検討に向けて必要な月面データを取得してくることを取得することを目指している。
















![70万円台で購入可能なヒューマノイド…Unitree『R1』[動画]](/imgs/sq_m_l1/2223054.jpg)

![見えない死角を一掃! 駐車も後席確認もラクになる「サポートミラー」[特選カーアクセサリー名鑑]](/imgs/sq_l1/2231784.jpg)

