







マツダ「CO-PILOT CONCEPT 2.0」(コ・パイロット・コンセプト、プロトタイプモデル)に試乗する機会を得た。同乗体験するとともに、開発担当者に詳しい話を聞くこともできたので、この技術の詳細を掘り下げたい。
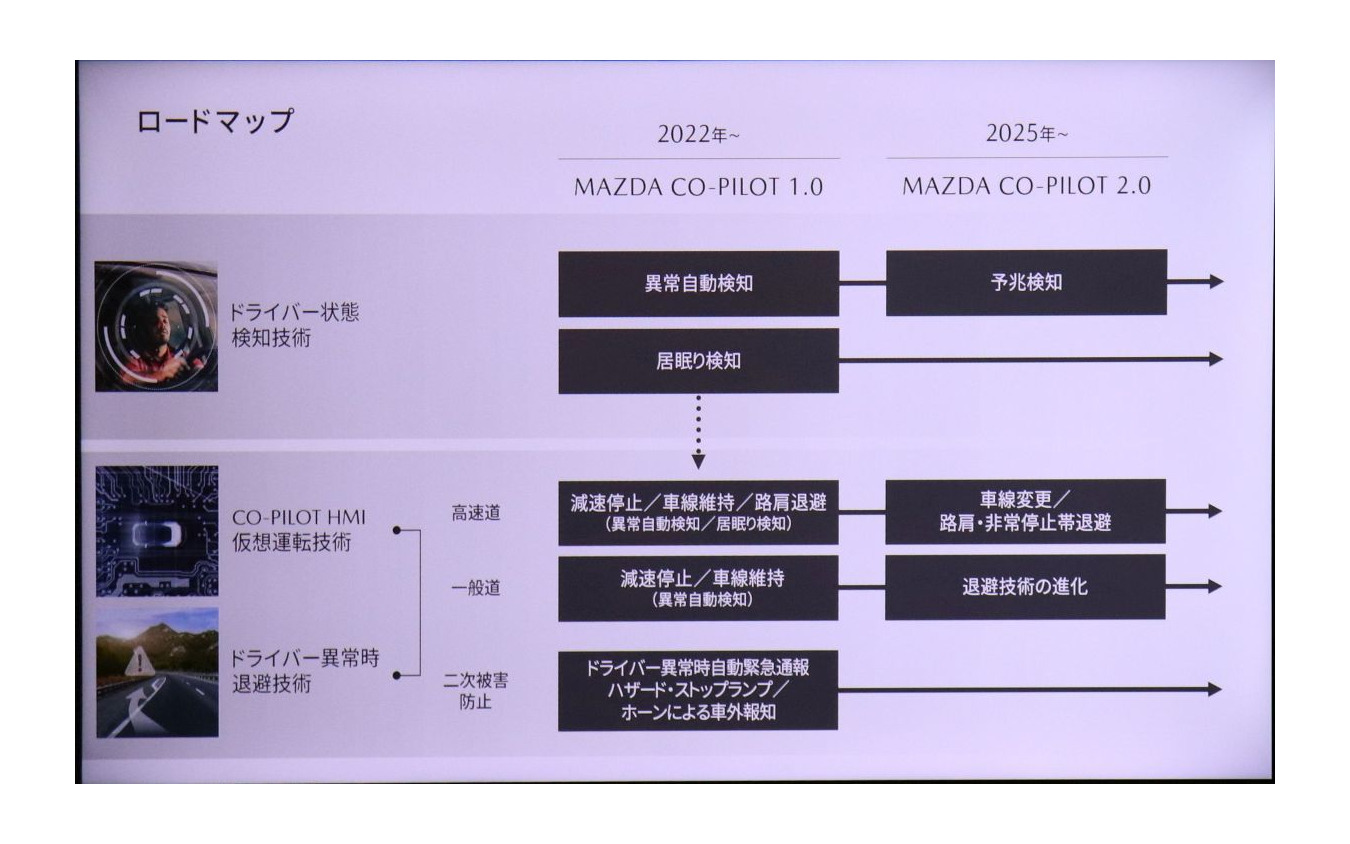
CO-PILOT CONCEPTはマツダが11月に発表した安全運転支援システム。ドライバー異常時に車両を安全に自動停止させる技術だ。2022年のラージ商品群に1.0(同一車線停止)が搭載される予定だ。今回試乗したのは、2025年に市場投入予定の「2.0」の開発中のプロトタイプモデル。2.0では、異常検知に加え異常を予兆する機能と車線変更や退避場所を考慮した自動停止機能が加わる。
 マツダの「CO-PILOT CONCEPT 2.0」
マツダの「CO-PILOT CONCEPT 2.0」◆「ドライバーに寄り添う」の意味
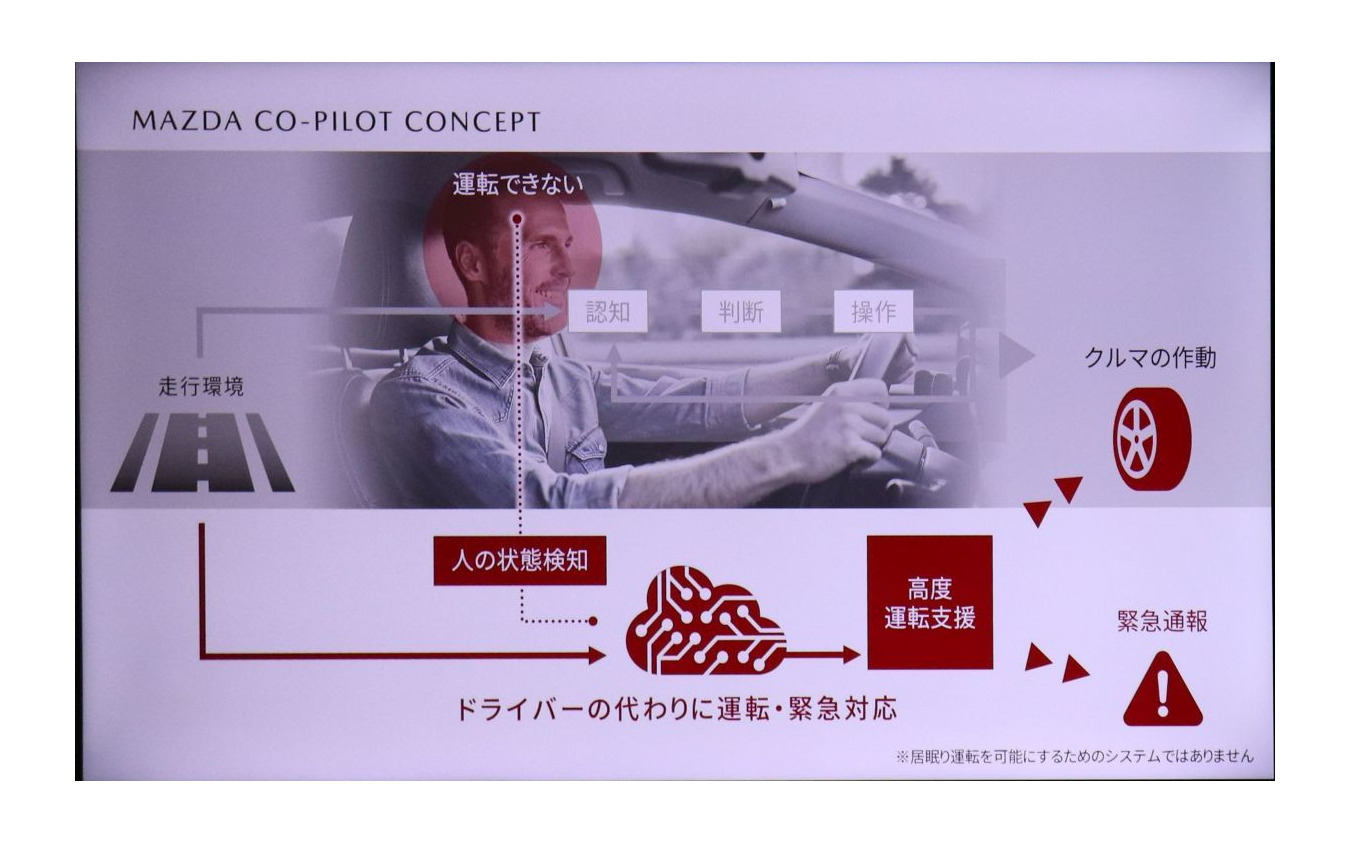
「CO-PILOT(コ・パイロット)」とは飛行機では機長の補佐をする副操縦士のこと。ラリーで助手席に座る「ナビゲーター」も「Co-Driver(コ・ドライバー)」という。レギュレーション上、ナビが運転しても競技が成立するからだ。マツダの「CO-PILOT CONCEPT」は、ドライバーに陰で寄り添い、いざというときにはドライバーの運転を引継ぎ、さらには同乗者や車外に対しても必要な情報やアドバイスを与えるというもの。
だが、この説明だけではいままでのADAS(高度運転支援システム)との違い、技術の詳細は伝わらない。各フレーズの意味を技術的に紐解いていきたい。まず、「ドライバーに寄り添い」という意味は、単にイメージや比喩としての表現ではない。CO-PILOT CONCEPTでは、車両システムが、車両の挙動や周辺環境、そしてドライバーの操作や状態を総合的に判断し、危険や異常を検知する。ここまでの機能は各社の衝突被害軽減ブレーキ(自動ブレーキ)や車線逸脱防止機能、ドライバーモニタリングシステムでも実現している。マツダの新技術の違いは、何をもって異常かどうかを判断しているかにある。
近年、これらの異常検知はAI(機械学習)を利用しているとはいえ、いわばパターンの検知であり、じつは高度な推論処理は行っていないことが多い。わかりやすくいえば、よくある(と言っては失礼だが)AI搭載カメラは、対象が歩行者である、車両であるといったパターン認識の情報を出力するが、それがこちらに向かっているのか、横断しているのか、危険な状態にあるのか、といった情報は出力しない(出力できるカメラも存在するが)。
対象認識異常の判断はもっぱら従来型のプログラム(ソフトウェア)が行うことになり、この部分はAIは関与していないことが多い。プログラムが、カメラからの情報と車両センサーの情報を論理判定、つまりイエスかノーかの条件が揃ったときのみ、ブレーキを踏んだり、ハンドルを切ったりする制御を行っている。
◆ドライバーの操作とAIの仮想運転を比較
もっとも、こうするのは、それなりの理由もある。今のところ、自動運転や人工知能の議論の中では、実行結果が再現できロジックを検証できなければならないという考え方がそのひとつだ。一方、AIの処理内容について明確な責任を負わせることはできないという反論もある。人間の意識や思考が数値化しにくいようにディープラーニングなどの人工知能の内部処理や推論は外から検証しにくいし、そもそも高度になればなるほど人間と同様にいつも同じ結果(判断)になるとは限らなくなる。
 マツダの「CO-PILOT CONCEPT 2.0」
マツダの「CO-PILOT CONCEPT 2.0」
ともかく、現状の市販車両に実装されているAI技術は運転操作の「認知」(センシング)と「操作」(アクチュエーター)までで、「判断」(思考)まで踏み込んだものは少ない。マツダの「CO-PILOT CONCEPT」は、異常の検知をセンサー情報の論理判定だけでなく、この状態ならドライバーは次にどう操作すべきか、という車両側の判断結果も利用する。
これまでのADAS機能は、いわばその場その場の状況だけで危険かどうかを判定して反応していたが、CO-PILOT CONCEPTは、ドライバーの運転操作や挙動、車両の挙動と、車両側のAI(機械学習モデル)が実行している仮想運転の結果を比較することで、異常や危険を判定している。つまり、CO-PILOT CONCEPTは内部的には自動運転に近い認知処理(機械学習による統合制御)を行っていることになる。
これにより、異常検知の精度向上も期待できる。プログラムによる条件判定のみでは、どうしても誤検知、誤作動の排除に限界がある。条件判定モデルでは、判定要素をあらかじめ決定しておく必要があり、制御可能な範囲が限られるからだ。
◆見えない脳機能の低下で異常の予兆を検知する
CO-PILOT CONCEPTでは、異常を予兆する技術も研究されている。現状でも瞬きや頭の動きで「居眠り」や「眠気」を判定する機能は実用化されている。これも一種の予兆検知といえるが、目を閉じる、姿勢が崩れるといった現象はすでに「結果」であって急激な意識変化(意識喪失など)の検知だ。
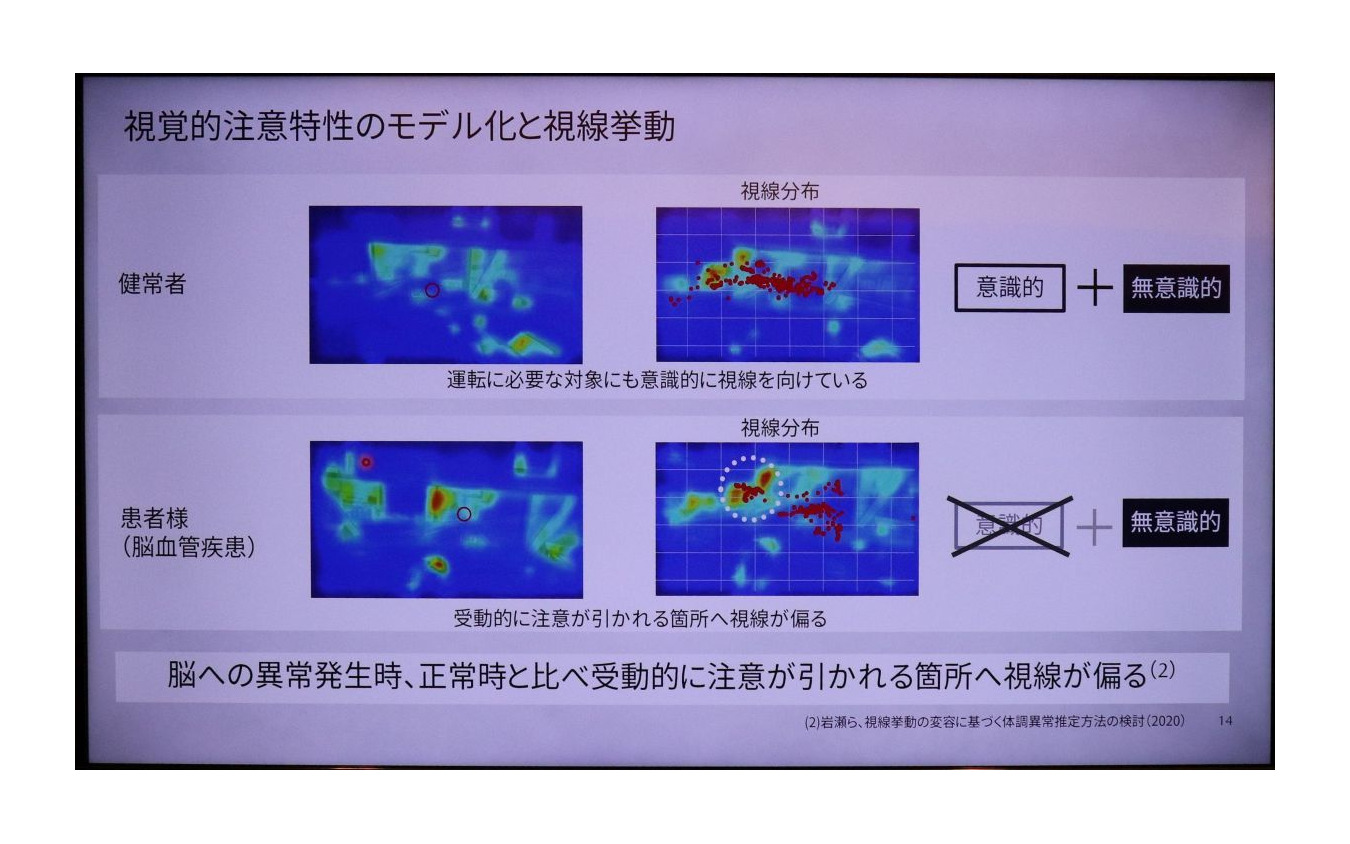
無意識的に脳や脳幹の機能が徐々に低下していくような障害・異常の検知は簡単ではない。マツダは筑波大学・広島大学などと協力し、脳機能の低下を視線の動きから予兆検知する技術を開発中だ。この研究や脳疾患のある患者による測定データから、大脳機能が低下してくると視線の動きにパターンが見られることがわかっている。健康または覚醒状態では、視線は能動的に動く。しかし脳機能が低下してくると、変化や特徴のある部分に視線が集中しがちになる。視線が一点に集中するわけではないので、眼球の動きだけでは判断できない。動きのパターンから、変化のある部分だけに受動的に視点が移動しているかを判定する必要がある。
 マツダの「CO-PILOT CONCEPT 2.0」
マツダの「CO-PILOT CONCEPT 2.0」本人や周りの人も気が付かないような脳機能低下が検知できれば、予兆検知としてドライバーや同乗者への注意喚起、予防的な制御介入が可能になる。開発中のプロトタイプでは、脳機能の低下を検知すると、まず万が一に備えるためすべてのADAS機能を(解除していても)有効にする。その上でドライバーに注意や警告を促す。脳機能が低下して無意識的な運転をしているときは、ドライバーに自覚がないこともある。警告は本人に気付かせると同時に同乗者への注意喚起にもなる。
◆クルマを退避・停止させるために必要な機能
 マツダの「CO-PILOT CONCEPT 2.0」
マツダの「CO-PILOT CONCEPT 2.0」最後に、ドライバーの運転引継ぎとアシスタント機能だ。CO-PILOT CONCEPTは、ドライバーの運転操作とは別に車両がバックアップとして自動運転に近い処理を行っている。車両も疑似的に自動運転処理を行っているので、ドライバーの異常を検知したならすみやかに運転処理を引き継ぐことができる。
ただし、そのまま運転を引き継ぐのではなく、車両をすみやかに安全な場所に移動させ、停止させる。退避・停止処理のみ引き継ぐ。高速道路なら車線変更を伴いながら路肩や安全な場所で停止させる。一般道でも同様な退避制御を目指している。そのため、プロタイプには、ベース車(試乗車はMAZDA 3)のセンサー類の他、12個のカメラ、高精度GPSロケーター、高精細3Dマップ、路車間通信などを搭載している。
これにより、より安全な停止場所の探索と判断を確実にする。一般道であれば、停止場所は幹線道路より路地や交通量の少ない道路を選ぶことも可能だ。もちろん周辺車両も検知しているので、どの車線、どの位置で停止させるかも制御する。路車間通信(V2I)では、道路側が対応していれば、信号の状態や切り替わるタイミングも停止場所・位置の判断に利用する。退避シーケンスの実行中に赤信号を検知すれば、そこで止まれる。
◆目指すは他国、マップやITSがない場所でも機能すること
 マツダの「CO-PILOT CONCEPT 2.0」
マツダの「CO-PILOT CONCEPT 2.0」試乗したクルマはプロトタイプだが、カメラ12個やGPSロケーターなどおそらくそのままでは市販できない値段になる車両だ。マツダが高機能な装備にこだわるのは理由がある。高精細マップやV2Xだけに頼ると、マップがない道、路車間通信インフラが整備されていない道路・交差点ではCO-PILOT CONCEPTが使えないことになる。
マツダは、これらの技術を自動運転というより「ドライバーが自分の意思で自由に行動できる」ことを支援するためのものだとする。高齢者ドライバーの問題や交通事故ゼロのために、無人車両を開発するのはひとつの解決アプローチだが、マツダはドライバーが運転するクルマの安全性向上や無事故を目指している。
CO-PILOT CONCEPTは、このうちドライバー要因の事故を減らすために取り組んでいる技術だ。したがって、決められた場所や条件だけで動作する機能なら開発しても意味がない。別の言い方をすれば、この技術は当然海外市場でも展開させなければならない。国ごとの法律やマップデータ、インフラに特化システムを個別に開発していたらきりがない。もっと高度な設計と機能が必要だ。
予兆検知や仮想運転技術を研究開発しているのは、最終的に、AIモデルを媒介とした統合化されたECUアーキテクチャでグローバル展開を考えているからだ。モデルベース開発をいち早く取り入れ、90年代後半から地域サプライヤーのうち、とくに電装品・電子部品関連の業態変革を進めてきたマツダは、ADAS機能向けに機械学習やシミュレーション技術に特化した独自の開発インフラとエコシステムを構築している。
マツダは決して自動運転を開発しているのではないと主張するが、このような開発体制は、自動運転や無人タクシーなどを開発している会社のそれに近い。SAEの自動運転レベルでいえば、「制約条件下でシステムが制御を行う」レベル4自動運転といってもいい技術だろう。






















