






KDDIとアイサンテクノロジーは、長野県塩尻市の中山間地域で、自動運転車からドローンを離陸させ、また自動運転車に着陸させる、ラストワンマイル物流の実証に成功した。
ドローンが、移動する自動運転車の位置に合わせて離着陸することに成功したのは日本で初めて。実証は荷物を載せたドローンが自動運転車上から飛び立ち、中山間地域を飛行したのち、自動運転車上へ帰還するシナリオで実施した。実証では高精度位置測位を活用した。
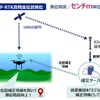
自動運転車の走行とドローンの運航を統合管理する「協調制御プラットフォーム」や、高精度位置測位を活用し、中山間地域で自動運転車とドローンを組み合わせて自動荷物配送を行うユースケースを想定して実施した。プラットフォームを用いた協調制御によって、自動運転車の位置情報を参照しながらドローンを逐次制御することで、ドローンが正確に自動運転車上に着陸できることを確認した。
また、ドローンにはセルラー通信と衛星通信の両方が利用可能な通信モジュールを搭載した。セルラー通信が利用できないエリアでは衛星通信に切り替えることで、プラットフォームとの接続性を保ったまま自動飛行を行えることを確認した。
両社は今後、労働力不足が顕在化する2030年頃を目途に、都市部からの大規模な配送は自動運転車、陸上からの輸送が困難な経路ではドローンで配送する荷物配送サービスの社会実装を目指す。
今回の実証はKDDIスマートドローン、KDDI総合研究所、ティアフォーの協力のもとで実施した。













![70万円台で購入可能なヒューマノイド…Unitree『R1』[動画]](/imgs/sq_l1/2223054.jpg)

