

科学技術振興機構と東京大学、名古屋大学は5月14日、自動運転技術を用いた教習システムを開発したと発表した。
東京大学大学院情報理工学系研究科の加藤真平教授らの研究グループは「完全自動運転における危険と異常の予測」についての研究している。今回、その一環として模範的運転モデル対象として自動車教習所の教習指導員に着目、運転行動をルール化した運転モデルを開発した。
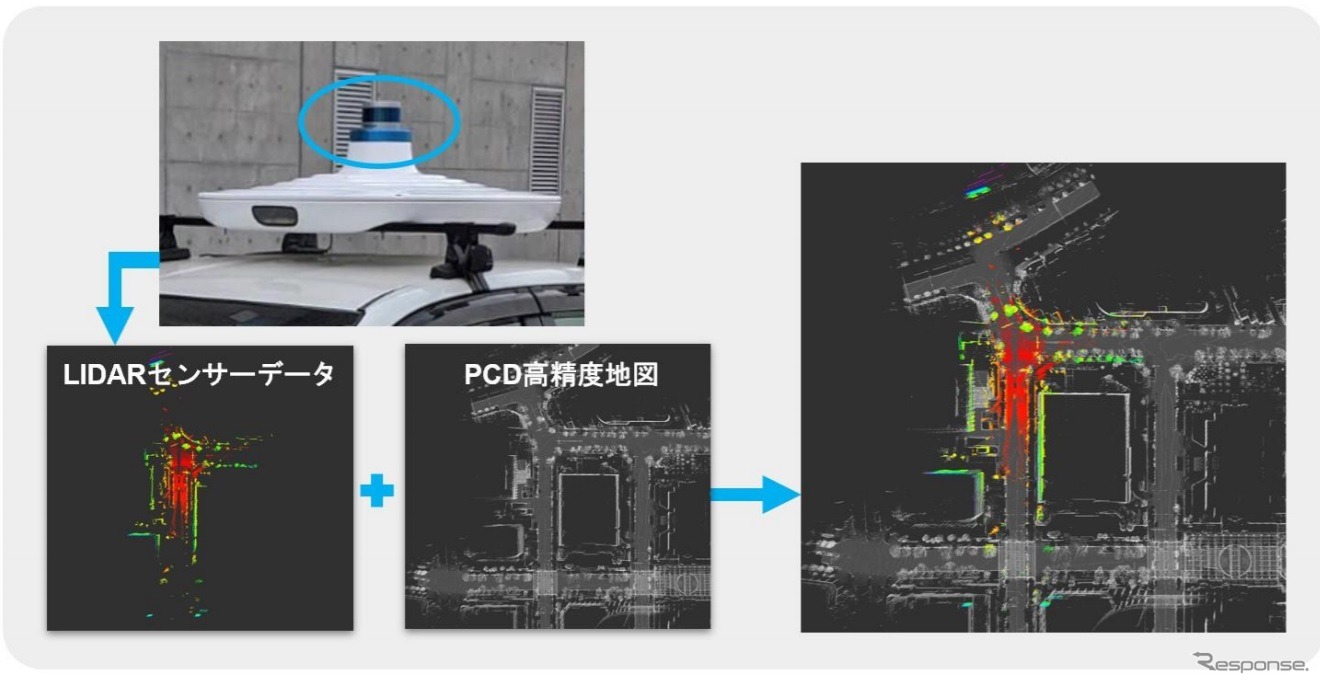
また、自動運転技術を用いてリアルタイムに得られる位置推定や障害物検知の結果を評価指標として開発した運転モデルを使い、ドライバーの運転行動の定量的な評価と、評価に基づく危険予測を可能としたという。
予測に応じて自動でブレーキ制御を行うことで危険を回避する手法を確立し、これら評価手法と危険回避手法をシステム化することで、AI(人工知能)教習システムを開発した。
自動車運転教習所は教習指導員の高齢化や採用難による人材不足により、新規免許取得者や、高齢者講習の予約待ちが問題となっている。今回開発したシステムを自動車教習所に適用することで、教習指導員の業務負荷軽減、新規免許取得者や高齢運転者の受け入れ拡大につながるとしている。









