


東京工業大学 鈴森康一教授とブリヂストン 櫻井良フェローらの研究チームは1月26日、内閣府主導の研究開発プログラム「ImPACTタフ・ロボティクス・チャレンジ」において、油圧駆動ハイパワー人工筋肉の開発に成功したと発表した。
ImPACTタフ・ロボティクス・チャレンジは、内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム。東日本大震災、阪神淡路大震災など、災害時の極限環境においても人命救助や安全確保に効果を発揮できる、タフでへこたれない「タフロボット」の実現を目指している。
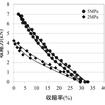
現在、大多数のロボットは電気モータで駆動するが、構造上、「重くて力が弱い」、「壊れやすい」、「状況に応じて大きな力を出すと同時に柔らかく動くことが難しい」という問題があった。今回開発に成功したハイパワー人工筋肉は、「マッキベン型」と呼ばれるタイプの人工筋肉で、ゴムチューブとその外周に編み込んだスリーブで構成される。通常のマッキベン型人工筋肉は0.3~0.6MPaの空気圧で動作するが、開発品は油圧駆動が可能。マッキベン型人工筋肉より遙かに高い5MPaの圧力での動作を実現することで、格段に大きな力を発生させることに成功した。
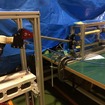
また、今回開発した人工筋肉は、ゴムチューブと編み込まれたスリーブにより構成されることから、外部からの激しい衝撃や振動に対して頑強であることも大きな特徴。インパクトドリルを使った壁の穴あけなど、電気モータ駆動のロボットでは難しかった、衝撃の加わる作業が行えるタフロボットの実現が期待される。







