


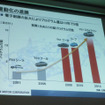

日産自動車総合研究所所長、アライアンスグローバルダイレクターの土井三浩氏が1月14日オートモーティブワールド2015専門セミナーで講演した。タイトルは「“考えるクルマ”と交通社会の未来」。
自動運転が実現すればスマホをいじりながら移動できる、読書しながら運転できる、もう前向きのシートは要らない…自動運転に関連したコンセプチュアルな話が相当すすんではいるが実際にはそう簡単ではない。土井氏はこう指摘し“考えるクルマ”づくりまでの現時点での課題について解説した。
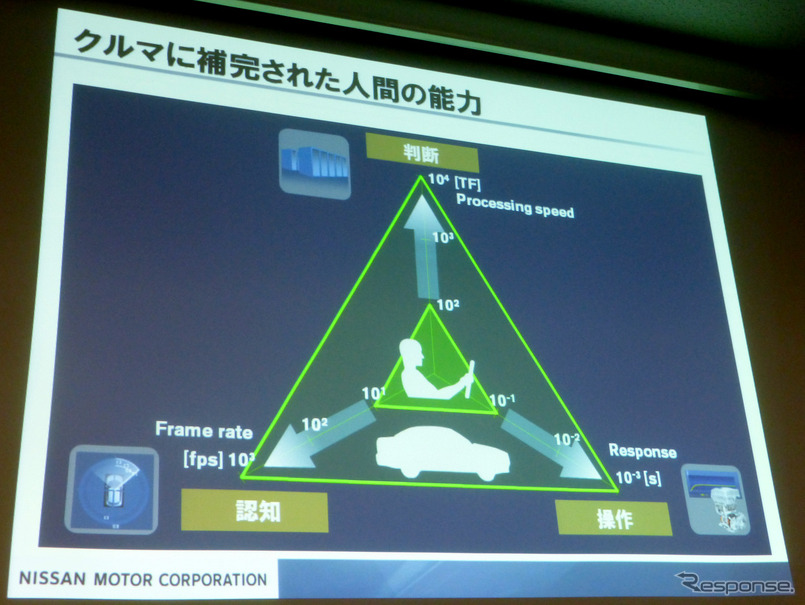
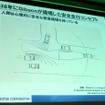
自動運転のキーテクノロジーを整理するとセンシング、認識、判断、アクションの4プロセスがあり、このうち認識と判断の過程は人口知能などを用いて開発が進められているものの、依然として難しい課題があるという。
◆認識の困難な信号、フェンス越しの物体、車線の推測
例えば認識の過程で代表的な課題に信号の認知が挙げられる。
「信号で、人間が赤が青かを見るのは簡単です。しかしテールランプの赤と信号の赤をクルマにどう判断させられるでしょうか。また信号は基本的には高い位置についているわけだが、遠くにいるときは目線の高さにあるが、クルマが進行して近くにくると自分の真上にくる。このように広い範囲でずっと信号をトレースできるようなセンサー、高角かつ遠くの位置まで高い分解能を有するカメラがどこにあるのでしょうか。
また、赤と青のあいだにある“黄色”信号の認識も問題です。赤と青はRGBの基本色だが、黄色はどっちでもない。では赤でも青でもないのを黄色と認識してよいのでしょうか。すると信号がこわれているときとの区別がつかなくなります。このように信号一つをとってもそう簡単にはパターン化できないのです」
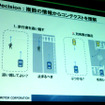
◆「線」の無い交差点のどこを走るか
認識の二つ目の課題には米国で頻繁に見られるような“フェンスの仕切り”が挙げられた。「車がフェンス越しに、人やクルマが来ていないかどうかを確認する、それを自動発信するのは相当難しい」。三つ目は車線の認識。「自動運転が可能となる大きな理由に車線の存在が挙げられますが、運転において重要なサインである車線が前の車でかくれていて見えない状況や状態がわるくて消えているような状況に対応できるでしょうか。(車線の)ない部分を、ある部分をもとに推定しながら走るためにディープラーニングのような人口知能を用いながら推察し走ることになる。ですがさらに困難な状況として、交差点などのように白線の無い場所も通過しなければならない。
さらにはセンシングした情報をもとに周りの移動体のベクトルをみながら自分のパスを決めていく技術が必要な状況もありうる中で、これをどこまでの高度で達成できるかも課題の一つになる」
◆市街地走行の難しさ、“読めない”人の行動にどう対応するか
では判断の過程での課題はどのようなものがあるか。運転席から左手に見える歩道を、人が歩いている写真を見せながら「自動運転の車が、もうすぐ目の前を横断する“かもしれない”歩行者がいる時にどう対応できるか」と問う。これも判断における難しい課題なのだという。
目の前の歩行者が7m先の信号で横断するかもしれないが、もしかすると手前で横断するのかもしれない。こういう微妙な状況では従来普通のドライバーであれば“~かもしれない”程度で判断できていたことを、クルマにさせようとすると難しいことになる。「しかしこういった微妙な判断もできないと乗っていて快適で無くなってしまい完全なロボットカーになってしまう。自動運転が面白いのは、ロボットカーをつくりながらも人のハートを入れるというところにある」
また市街地を走行することも視野に入れると多数の歩行者の行動も関連してくる。複数の人が歩いているときにそれぞれの人間がどっちのベクトルに移動するかをどうやって判断するかのアルゴリズムが必要だ。このようにしてあらゆる状況を書き出していくと1000項目は超えてしまい、これをクルマがすべて復習してくれるようになるわけではないため、自動運転者は走行予定の全部の道を走り切って初めて準備ができたといえる。そう考えると開発には膨大なエネルギーと工数が必要となる。
そのような課題を抱えながらも現在リアルワールドでの実証を重ねながら開発を進めているところ、なのだと土井氏は語った。