
ボルボ・カー・グループは、自動運転車両の自車位置を道路に埋設したマグネットで把握する研究プロジェクトを実施したと発表した。
高い精度で正確に自車位置を把握することは、自動運転車の開発において重要な課題の1つとなっている。測位技術としてはGPSやカメラなどがあるが、物理的な障害物や悪天候の影響を受けるという弱点を持つ。一方、道路に埋め込んだマグネットによる自社位置把握は、外部環境の影響を受けることはない。
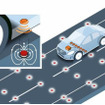
今回、ボルボの研究チームは、本社のあるスウェーデン・イェーテボリ郊外に、長さ100メートルのテストコースを設置。丸いフェライトマグネット(40×15mm)を一定間隔で、路面から地中200mmの深さに配置した。テスト車には、複数の磁力センサーを装着し、検出範囲、信頼性、耐久性、コスト、道路の維持管理への影響などを評価した。
ボルボ・カー・グループの予防安全技術リーダー、ヨーナス・エクマーク氏は「これまでのテストにより、インフラ整備や車体オンボードセンサーでの検知技術の両面において、フェライトマグネットの使用が効率的かつ信頼性が高く、比較的安価なソリューションであることが分かってきた。次のステップでは、実際の交通環境においてテストを実施する」とコメントしている。







