10月15日から東京ビッグサイトにて開催中の「ITS世界会議東京2013」。初日のExcutive Session「自動運転ー実用化への道のり」には自動車研究所ITSセンターの青木啓二氏が登壇した。
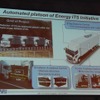
青木氏は、自動運転の実装アプローチとシナリオについて紹介。具体的にはCO2排出量削減と省エネルギーを目的とした「エネルギーITS」プロジェクで実装された「トラックの自動運転隊列走行システム」について触れた。
この走行システムは、トラック3台を時速80kmで走らせるものだ。車間距離を4mと短く制御することで、先頭車両の背後で近接走行する後続車が風を受けにくくなり、結果として燃費も良く、CO2の排出が少なくて済むようになる。
このシステムを実現するためには、前後の車両位置を正確に確認し、自動追尾・操舵を実現する「隊列形成技術」のほか、車車間通信(V2V)によって目標車間距離になるように素早く加減速を行なう「車間距離・速度制御技術」、白線を認識して操舵をコントロールする「車線保持制御技術」、および「衝突回避・安全確保技術」が求めらる。
そのため、車両前方に車間距離検出用のミリ波レーダーを備えるほか、白線認識用として2対の異なるセンサ(CCDカメラとレーザー)を前後に装備することで信頼性を高めている。また車車間通信についても無線/赤外線方式を併用し、冗長性を高めた。
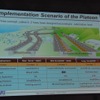
本トラックの自動運転隊列走行システムは、筑波にて実証実験が行なわれているところだが、今後のシナリオについても公表された。2020年までのニアタームで、協調型ACC(Cooperative Adaptive Cruise Control)を軌道に乗せ、車間距離20m(80km/h時)で、CO2を3%削減する。また2030年までのミッドタームでは、部分的な自動運転を進めて、車間距離10m(80km/h時)、CO2削減を8%まで進める予定だ。さらに2030年以降のロングタームで、最終的に完全自動化を実現し、車間距離4m(80km/h時)、CO2削減15%を目指す方針だ。
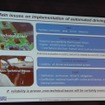
青木氏は「自動化技術実装における今後の技術的な課題は、車内外の情報をより容易に認識できるヒューマン・マシン・インターフェイス(HMI)の開発や安全性・信頼性をさらに高めることだ」と述べた。一方、技術的な問題以外では「自動化に対する社会的な受容や法的な問題も解決していかなければならない。ただし、技術的な信頼性が証明されれば、こうした問題も克服できるだろう」と説明した。