
国土交通省の「オートパイロットシステムに関する検討会」は、高速道路上の自動運転を実現するための中間とりまとめとして「オートパイロットシステムの実現に向けて」を公表した。
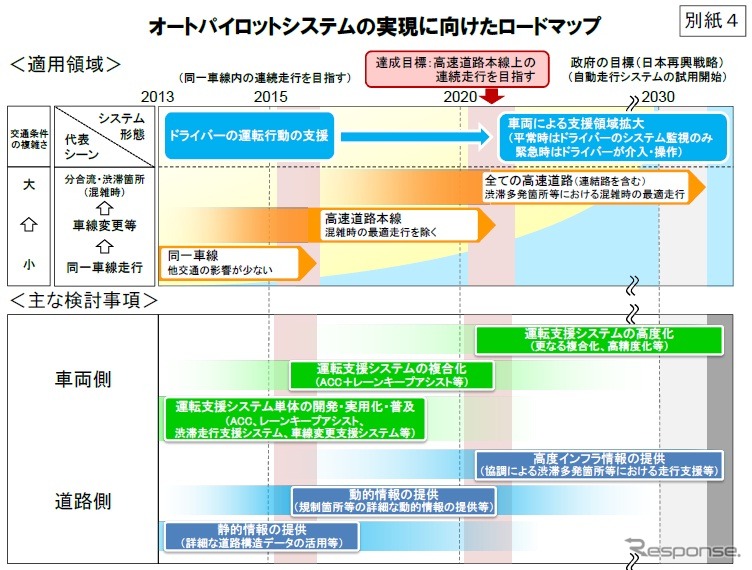
同検討会では、高速道路上での自動運転を実現するためのロードマップを示した。それによると、2020年代初頭ごろまでに、高速道路本線上で、混雑時の最適走行を除く高度な運転支援システムによる連続走行、2020年代初頭以降に、分合流部、渋滞多発箇所など、混雑時の最適走行を含む高速道路本線と連結路で高度な運転支援システムによる連続走行を実現する目標を掲げた。
これらを実現するため、ITS世界会議東京で検討会の検討成果を公表するほか、道路構造データなどを活用した安全運転支援システム/位置特定技術の研究開発などを進める。
また、今後の課題として協調型ITSなど、技術・安全面の検討、制度や社会的受容性なども検討する。
今後、ロードマップに基づいて官民が連携して着実に実施していく。同検討会は実施内容を確認すると同時に、見直しも継続的に実施する。







