


日本電信電話(NTT)は信号機を使わないモビリティ実現に向けた全体最適制御のための技術を確立した。NTTが5月30日に発表した。交通信号なし、事故なし、滞留なしの「シグナルフリーモビリティ」実現に向けて前進したとしている。
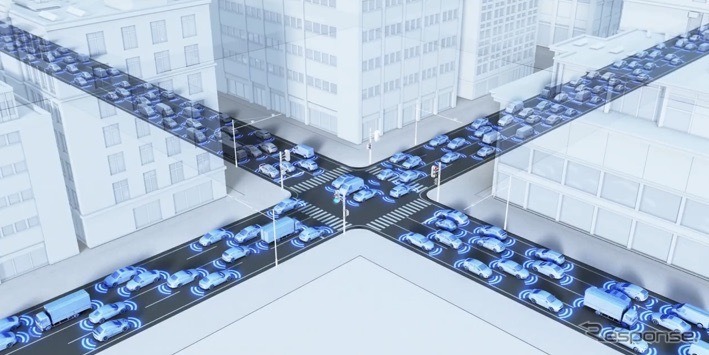
現在の信号機を使った交通制御では、信号待ち、合流、一時停止などの要因で渋滞を引き起こす。シグナルフリーモビリティとは、信号機のない街を自動運転車が相互に通信をしながら自律走行し、車同士が衝突せず、全体の移動時間を短縮する、というコンセプトだ。
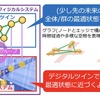
シグナルフリーモビリティでは、車群から収集したデータをデジタルツイン(シミュレーション)で解析し、交通全体の最適状態を予測して自動運転を制御する。デジタルツイン上で少し先の未来の状態を予測し、それに近づくように実世界の交通を制御する、フィードバックループをリアルタイムで繰り返すという。
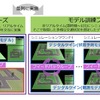
NTTの研究では、デジタルツイン上の状態予測系のモデル化、データ駆動型で、モデル学習する方式を確立することが課題のメインだ。今回の研究では、各車とそのつながりで構成されるグラフを用いて、デジタルツインの状態予測系をモデル化した。デジタルツインを介して10~20台の自動運転ミニカーを制御するシステムを構築し、実環境で交通をリアルタイムに全体最適制御する実験に成功した。
今後、交通制御実験の規模を拡大し、より実世界の交通に近い状況の実証実験を展開していく。

【父の日 ビール】父の日ギフト 父の日プレゼント ビール 飲み比べ 人気商品 詰め合わせ ギフト プレゼント 5種10本入り セット よなよなエール クラフトビール お酒 メッセージ入り [ 日本 350ml x 10本 ]
¥3,685 (¥368 / 本)
(価格・在庫状況は記事公開時点のものです)
¥3,685 (¥368 / 本)
(価格・在庫状況は記事公開時点のものです)






