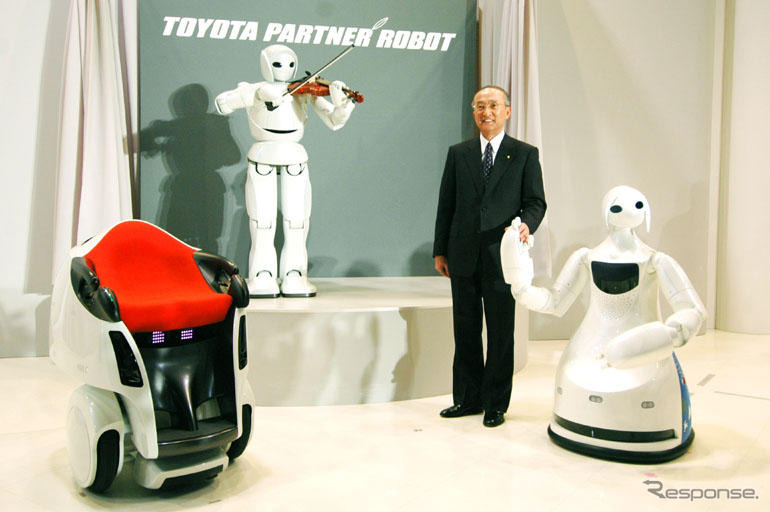



トヨタが2007年12月に発表した第2世代『パートナーロボット』。その発表の場で、ロボット開発で当面のハードルといわれている完全自律行動の実現に向けた新しい技術についてのさまざななビジョンが発表された。
そのコアテクノロジーのひとつは、3D-CCDによる立体認識、およびマッピング機能の実装。
今日、ロボットは基本的に決まった空間のなかで行動することが前提となっており、フリースペースのなかで動かすためにはビーコンを床に埋め、その場所を目安に自分の位置を推定している。
第2世代パートナーロボットの『ロビーナ』には立体認識とマッピングの機能が搭載され、実験段階にある。現時点で、すでに外部のセンサーに頼らず、自分の目で物を見て行動することが可能になっているという。
初めての空間でも、「報道発表会場となったユニバーサルデザインショウケースなら、20分ほど走り回れば、ほぼ完全にマッピングできる」(トヨタ関係者)。また、その空間に新たに物が置かれたりといった情報も随時、生成されたマップにフィードバックされるほか、人間が進路上に立ちはだかったりといった動的な障害物についても対応可能だ。
「工場からロボットを外に出したい」というトヨタの取り組みはまだ始まったばかりだが、技術的にはすでに最先端分野を視野に入れはじめようとしている。
トヨタはロボット事業を縮小しているソニーからもロボットエンジニアを受け入れているが、「ソニーのエンジニアがプロジェクトを携えて開発陣に加わったことで、トヨタのロボット開発のテンポは飛躍的に加速している」(事情通)という。運動性能の向上や知能化など、さまざまな技術開発において今後、ヒューマノイドでは先発のホンダとデッドヒートが展開されることになろう。