




一般道や交差点での自動運転を実現させようと考えると、おそらく現在のカメラやLIDARのようなセンサー情報の画像処理や機械学習によるアルゴリズムでは限界がある。一番の問題は、カメラやレーザー/レーダーでは「見えない」先の情報だ。
この問題には、V2X(Vehicle to Vehicle、Vehicle to Infrastructureなど)が対応する。車どうし、または車とITSスポットなどが、現在位置や進行方向、車の状態などの情報を交換しあい、カメラやレーザーが届かない範囲の状況を把握することで、衝突事故や緊急車両への対応を行うものだ。
コンチネンタルはV2Xのための通信モジュールを開発している。通信方式は国際的に規格化が進んでいるIEEE 802.11pを利用し、およそ500メートル圏内の相手と通信できる。位置情報はGPSを利用するが、一般的なGPS受信機は測位誤差を補正する必要がある。カーナビなどは、地図情報を利用して道路をトレースするようにしているが、コンチネンタルのV2X製品では地図情報を利用しないので、車速、各種加速度センサー、舵角情報などを利用する独アルゴリズムで補正している。
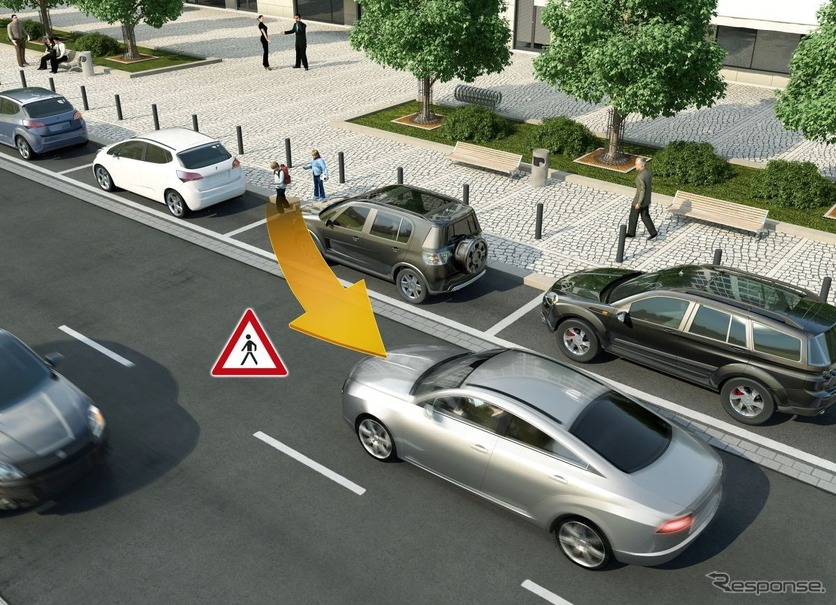
現在V2Xで想定されるアプリケーションは、交差点支援、対向車左折時支援(左側通行では右折時支援)、急ブレーキ支援、前方衝突警報、故障車警報、緊急車両警報だ。目視できない対向車、接近車両、停止車両を検知したり、カーブの先などの事故や故障車を検知したりするのにV2Xは有効だ。あるいは、歩行者との通信によって、交通弱者保護といった応用例も考えられている。