
玉川大学の量子情報科学研究所の研究グループは、アメリカのDARPA(米国国防高等研究計画局)で開発された量子計測の原理を自動車用量子レーダーカメラとして転用する理論を開発した。
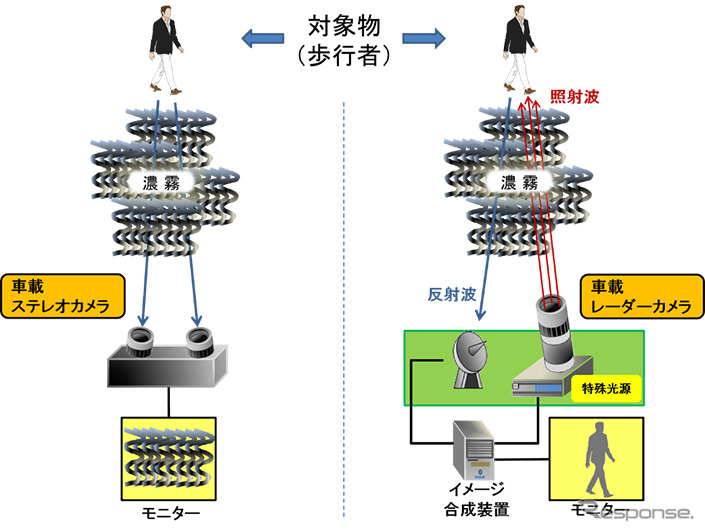
自動運転では、自動車の周辺の障害物を捕捉することが必要不可欠で、現在、歩行者などを捕捉するため、超高感度ステレオカメラやイメージング・ライダーなどが開発されている。これら自動運転用センサーは、原則、ターゲットに照射する光の反射波が運んでくる1次情報を分析することで障害物を画像化する。
こうした原理のセンサーは、反射波に対する擾乱によって性能が急激に劣化する。米国DARPAで開発された新しい量子計測原理では、反射波の2次情報を利用して画像化が可能となる。この特徴を現実的な擾乱の環境下、自動運転で実現する方法を研究した結果、100メートル程度のセンサー領域をカバーするシステムが実現可能であることを理論的に確認した。
今回の成果は、日欧の自動車部品メーカーなどに事前情報として提供。今後、車内の光ネットワーク化と連携して高性能化が期待されるとしている。
今回の研究成果は、3月14日からロンドンで開催されるInternational Conference on Quantum Physicsで第1報が発表される。




