
日立造船、日立製作所、ヤンマーは、準天頂衛星システムから配信される高度測位信号を活用して、トラクターを自動制御して農作業を行う実証実験をオーストラリアで実施する。
実証実験は、総務省が実施する「海外における準天頂衛星システムの高度測位信号の利用に係る電波の有効利用に関する調査」の委託先に選定されたのを受けて実施する。
実験では、オーストラリアの稲を栽培する農場で、高度測位信号を用いて自律走行型ロボットトラクターを制御、実際の農作業を行う実証実験を行う。実証実験を通じて、現在技術実証が進められている、RTNet、RMIT、MADOCAの3種類の高精度測位方式からオーストラリアでの精密農業に適切な方式を選定することを目指す。
今回の調査ではオーストラリアの電子基準点を使用した新しい精密単独測位方式(PPP-AR方式)を適用することで測位精度を高め、誤差5cmの精度での農作業を目指す。
調査は、日立造船、日立製作所、ヤンマーが中心となって、準天頂衛星運用機関である宇宙航空研究開発機構(JAXA)や、日本とオーストラリアの研究機関が技術協力、調査支援として参加する。
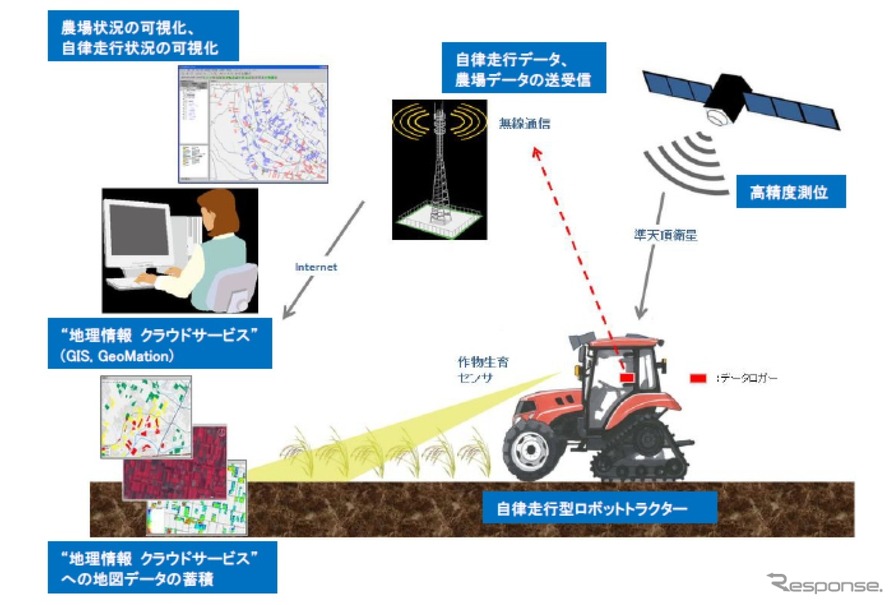
日立造船はプロジェクト全体を管理し、高精度測位システム調査検討・測位精度評価と全体評価を行う。日立は、トラクターに搭載されている作物生育センサーのデータと自律走行型ロボットトラクターの走行データを、地理情報クラウドサービスで収集・統合し、PC上の地図に作物の生育状況とトラクターの走行状況を可視化する。ヤンマーは、自律走行型ロボットトラクターを開発・管理・運用する。
2014年11月末に実施した最初の実証実験では、自律走行型ロボットトラクターを使用した稲の立毛時期における条間走行と農作業に成功した。
今後は1月に稲の生育状況を自律走行型ロボットトラクターで計測するなど、複数の農作業時期を変えて実施する。調査後は、実証実験で得られた成果をもとに、農業従事者や政府関係者へのヒアリングを通して、高度測位信号を用いた精密農業の実用化に向けた課題を抽出する。
将来的には、調査実施機関を中心としたコンソーシアムを形成し、精密農業事業を積極的に展開する予定。