

日本精工(NSK)は、触覚伝達装置向け減速機としてバイラテラルギアを開発したと発表した。
人手不足などを背景として、遠隔操作や作業の自動化が進み、サービスロボットの手の部分などで触覚を伝達するニーズが高まっている。医療機関では手術器具の遠隔操作、工場のFAでは多様な対象物を把持・搬送するロボットハンドにおいて、人間の触覚を再現する必要がある。
ハプティック技術の市場規模は2028年時点で約3000億円規模、年率10%の成長率が予測されており、今後大きな市場拡大が見込まれている。
手のひら程度のサイズで人間の繊細な触覚を再現するためには、コンパクトでありながら幅広いトルクを制御する触覚伝達装置が必要だが、それに対応した減速機の開発が課題となっていた。従来の技術で開発された減速機は、大型サイズであれば幅広いトルクに対応可能だが、小型サイズの場合は高トルクの駆動や繊細な制御が実現できないという課題があった。
バイラテラルギアは、入力軸と出力軸の双方向から高効率で力と位置を伝達する減速機である。出力軸の摩擦トルクが小さく、非常に小さい力でも出力軸を動かして入力軸へ伝達できるため、触覚の伝達が可能だ。
NSKは2021年に横浜国立大学と共に、バイラテラルギアの社会実装に関する共同研究を開始。2022年には国際ロボット展でのヒアリングを踏まえて、小型サイズ(φ20以下)のバイラテラルギアの開発を開始した。2023年の国際ロボット展で小型サイズのバイラテラルギアを出展して顧客ヒアリングを実施し、設計の改良と検証を行った結果、開発が完了した。
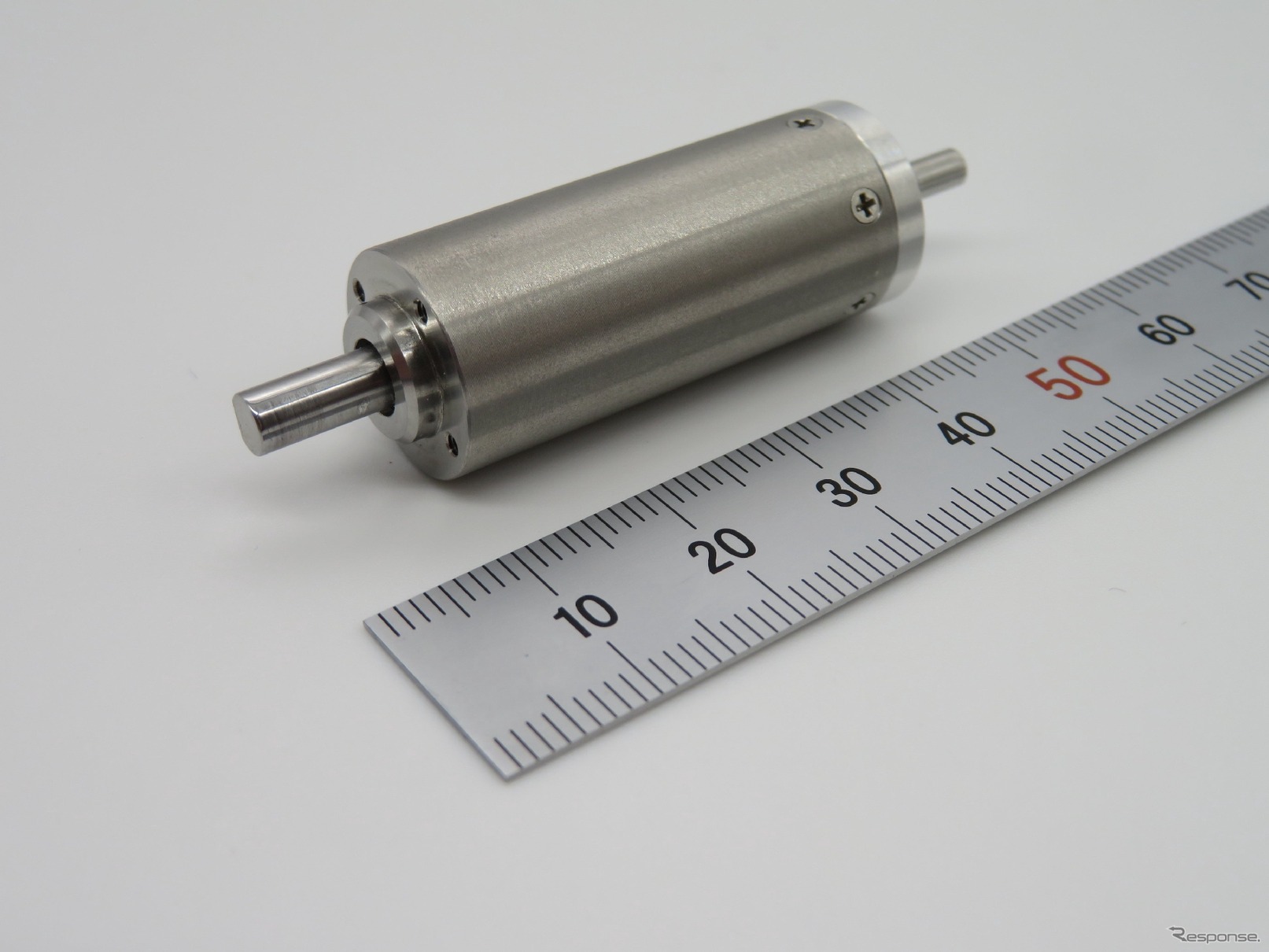
今回開発したバイラテラルギア(φ15mm)は、小型サイズでありながら大きなトルクで駆動が可能で、同等サイズの市販の減速機の中では最も大きなトルク駆動に対応する。また、他社類似製品(波動歯車)に対して、本開発品が安定的に駆動できる最大トルク(定格トルク)は約3倍、その出力軸を動かすのに必要な力(出力軸の摩擦トルク)は約20分の1となっている。
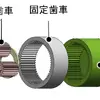
バイラテラルギアを触覚伝達装置向け減速機として小型サイズで開発するにあたり、技術課題があった。バイラテラルギアの構造上、遊星歯車と固定歯車・出力歯車のかみ合いにおいて大きな反力が発生する。遊星歯車を支持する軸受として一般的に採用されている滑り軸受を使用した場合、その軸受の摩擦が増大し、動力の伝達効率が悪化するという課題があった。
この課題を、NSKの培ってきた小型軸受の開発ノウハウで解決した。遊星歯車を支持する軸受に小径の転がり軸受を採用し(玉径0.5mm)、軸受周辺の設計を最適化。これにより、限られたスペースでも反力を受け止め、歯車の回転を支持し、伝達効率を保つことができるようになった。
従来技術を用いて開発(ダイレクトドライブモータを採用)した装置例Aに対して、本開発品を採用した装置例Bは、直径約4分の1、重量比約10分の1が可能となる(定格トルク:ABともに1Nm)。
装置の小型化により、製造時の材料が低減され、稼働時のエネルギー効率が向上するため、装置のライフサイクル全体においてCO2排出量削減に貢献する。
今後、この開発品は12月3日から6日に東京ビッグサイトで開催される「2025国際ロボット展(iREX2025)」に出展し、市場ニーズ調査や共同開発先の探索を実施する。その後、共同開発先とのコラボレーションにより、本開発品を実用化して新しい触覚伝達装置を開発し、市場投入する予定だ。



