日立アステモは10月20日、電動化車両の乗り心地を向上させるアンチジャーク制御と、電費・安定性を向上させるモータートルク制御(モーターABS)のプロトタイプを開発したと発表した。
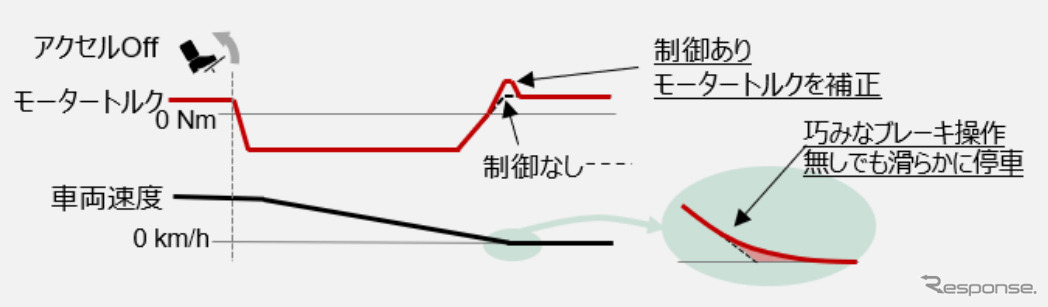
自動車の減速時には、速度に応じて制動力をコントロールしないとジャーク(加加速度)が起き、乗り心地を損なう揺り返しが発生するという課題があった。電動車は内燃エンジンと違い、加速や減速の際、一気にトルクを高めることができ、アクセルオフの際には、素早くモーターの回転を抑えるようトルクを効かせ、その力を制動力としつつ電気エネルギーに変換する回生ブレーキも備えている。
日立アステモでは、モーターのトルクの特性や回生ブレーキの制動力を生かし、アクセルオフの際、モーターの制動力が最適になるようトルク量を制御し、ジャークを抑制するアンチジャーク制御を開発。これにより、熟練したドライバーによる巧みなブレーキコントロールで揺り返しの少ない滑らかな停車を、一般のドライバーでも簡単に実現できる。










