


情報通信研究機構(NICT)は、ワイヤレスネットワーク総合研究センターがセンサ内蔵電子カーブミラーの情報をワイヤレスでデータ収集、道路環境を把握できることを確認した。
第5世代移動通信システム(5G)を想定した無線通信を使って知的交通インフラを構築する実験の一環。
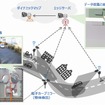
横須賀リサーチパーク(YRP)内に模擬交差点の試験環境を構築した。設置された電子カーブミラーには、センサとしてステレオカメラとLRF(レーザ測距器)を内蔵しており、車などの移動体や障害物の位置、速度、種類をリアルタイムに認識する。画像圧縮や切出しの情報処理によってデータ量を削減した後、5Gを模擬した無線システムによりエッジサーバにセンサ情報を送信する。
センサ情報のダイナミックマップへの反映を想定し、エッジサーバでは、複数のセンサ情報から位置、速度、種類などを抽出して道路環境の変化を認識する。無線通信による伝送時間の差異を吸収するため、認識した情報にはセンサ間で同期されたタイムスタンプを付与する。
エッジサーバに、センサ情報が統合され、同時刻の道路環境のスナップショットを生成する。これらの結果によってデータ量の削減で無線資源を効率的に利用しながら、多数のセンサを活用して道路環境を高信頼に把握できることを確認したとしている。
今後は、構築した環境で5Gシステムを導入し、様々な無線システムとの性能を比較評価するとともに、物体数や移動速度が異なる場合、管理対象エリアが広い場合など、条件が異なる場合に求められる機能要件を確認する。これらによって高度な自律型モビリティ社会の実現に必要な技術の確立を目指す。






