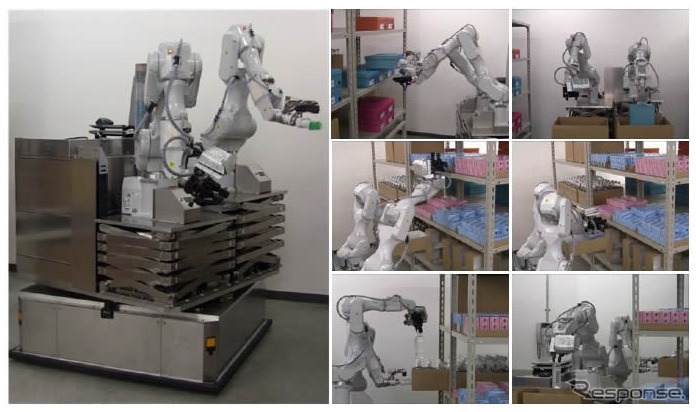

日立製作所は、日立物流の協力を受けて、物流倉庫での集品作業の自動化に向けて、目的の商品が保管されている棚まで移動して商品を取り出し、箱詰めまで行う自律移動型双腕ロボットの制御技術を開発した。
今回開発した制御技術によって移動しながら目的の商品を見つけて、アームを伸ばす動作や、1本のアームでは取り出せない商品を2本のアームで取り出す動作など、人と同様の集品作業が可能となる。
この制御技術を搭載したロボットにより、人手を前提とした多品種少量の商品を扱う倉庫で、集品作業を効率的、安定的に実施することが見込まれる。
日立では、走行台車の上に、高さを調節する昇降台を載せ、さらに2本の市販の産業用アームとグリッパ(手作業の手に相当する部分)を搭載した自律移動型双腕ロボットを製作し、人の作業を前提とした環境で効率的な集品作業を実現するためのロボット制御技術を開発した。
製作したロボットには、走行台車・昇降台・2本のアームなど、複数の機構を備える。人と同様、柔軟で素早い動作を実現するためには、各機構を連携させる必要がある。連携させるために各機構間で頻繁に通信を行うと、通信量や演算量が膨大となることや、全ての機構の動きを一元的に管理しようとするとプログラムが煩雑となり、動作の不具合が発生しやすいという課題があった。
今回開発した技術は、集品作業の要となる走行台車・昇降台・2本のアームの各機構を、少ない通信量で効率的に連携できるよう制御するもの。ロボットが動作するにあたって、各機構が必要とする最低限の情報や、各機構が動作する際の適切なタイミングを、事前に定義することで、通信量を抑えたまま各機構を連携させることを可能にし、人と同様の柔軟で素早い動作を実現した。
今回の開発は、日立物流と共同で取り組む、未来型倉庫の研究開発の一部として行った。日立は、技術を搭載したロボットの実用化を含め、物流事業の革新に貢献していく。
今回の研究成果の一部は8月26日~28日までアイルランドで開催される国際会議「Irish Machine Vision & Image Processing」で発表する予定。




