宇宙航空研究開発機構(JAXA)は、イプシロンロケット試験機の打上げを中止した原因について、地上装置による監視が、搭載計算機の姿勢計算開始より約0.07秒早かったため、地上装置が姿勢異常と判定し、自動停止したとの調査結果を明らかにした。
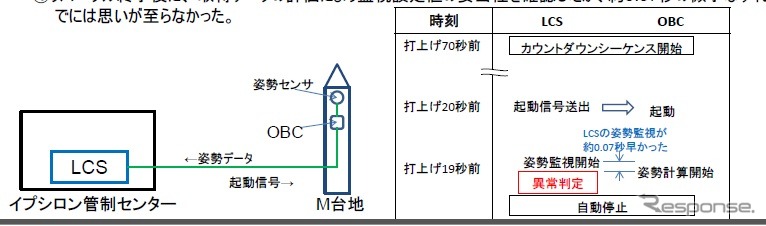
イプシロン試験機は、13時45分00秒の打上げに向け、打上げ時刻の70秒前に自動カウントダウンシーケンスを開始した。打上げ20秒前にイプシロンロケットの点検・打上げを遠隔で操作するための地上装置(LCS)からの信号でロケットの搭載計算機(OBC)を起動、1秒後にOBCがロケットの姿勢計算を開始した。
LCSでは打上げ19秒前から姿勢データの監視を開始したが、地上装置による監視が、搭載計算機の姿勢計算開始より約0.07秒早かったため、ロール姿勢異常を地上装置が判定、自動停止した。
異常データが示された場合に即座に自動停止がかけられるように監視時間を厳しく設定していたことに加え、搭載計算機と地上装置の時間のずれに配慮できていなかったことが原因としている。
8月20日に実施したリハーサルでは、打上げ18秒前までのカウントダウンシーケンスを流してシステム全体の確認を実施した。しかし、初めてロケットを搭載した状態でランチャ旋回を実施して、姿勢データを取得した結果、地上装置の監視設定値が適切ではないことが判明したため、自動停止項目から除外した。
更に翌日のリハーサルでは、監視設定値を適切に変更したが、天候不良によりランチャ旋回を行わず、カウントダウンシーケンスを模擬したため、リハーサルは成功した。リハーサル終了後、取得データの評価により監視設定値の妥当性を確認したが、約0.07秒の微小なずれまで思いが至らなかったとしている。
JAXAでは、今後の対策として、搭載計算機と地上装置の時間のずれを考慮した監視時間に変更する方向で検討する。併せて、徹底的に再点検を行い、次回の打上げに向けて万全を期すとしている。