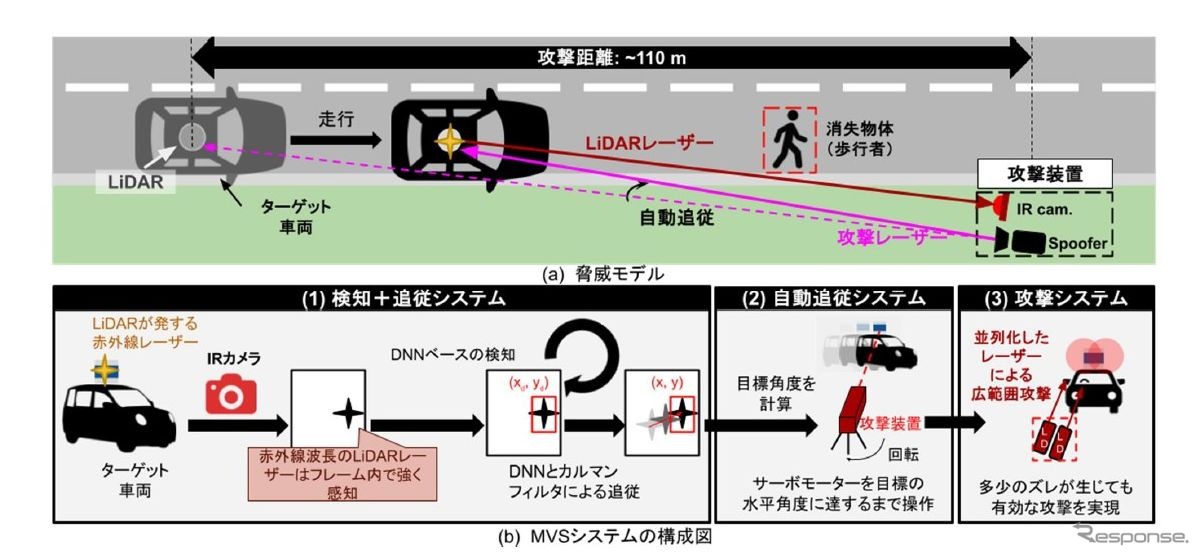
慶應義塾大学の研究チームが、自動運転車両のLiDARセンサーシステムに新たな脆弱性を発見した。高速走行中の車両のセンサーを長距離から無効化できることを世界で初めて実証し、自動運転の安全性向上に向けた重要な知見を提供している。
研究チームは、60km/hで走行中の車両に対して110m離れた地点からセンサーを無効化できることを確認した。さらに、最新のLiDARセンサーに対しても、既存の防御機能を回避できる新たな手法を発見した。
オープンソース自動運転ソフトウェア「Autoware」を搭載した車両での実証実験により、センサーの無効化が衝突リスクやシステム停止につながる可能性があることも明らかになった。この研究成果は、自動運転車両のセンサーセキュリティの重要性を示すとともに、より強固な安全対策の開発につながる重要な知見を提供している。









![ダッシュの表面&室内の温度上昇を抑制可能な、頼れる真夏の必需品“サンシェード”の新作[特選カーアクセサリー名鑑]](/imgs/sq_l1/2229857.jpg)

