




11月6日から9日までの4日間、東京ビッグサイトにおいて、2013国際ロボット展が開催されている。ここではNEDOブース(独立行政法人 新エネルギー・産業技術総合開発機構)の成果の中から、モビリティに関係する展示を紹介しよう。
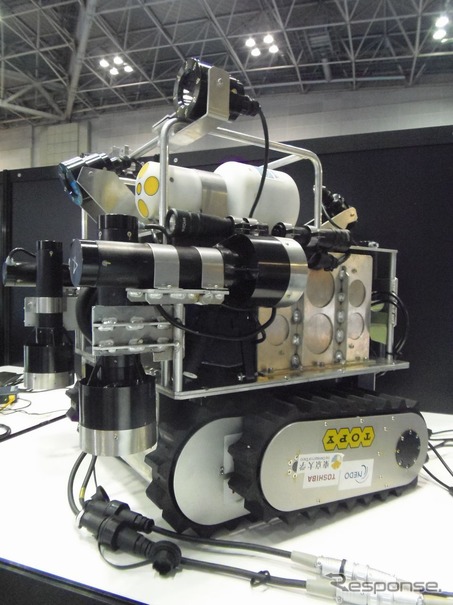
まず特殊なものとして目を引いたのが東芝の水陸両用移動装置・モニタリングデバイスだ。これは、災害時の大規模漏水の調査・把握を目的に開発されたもので、モニタリングデバイスとして、ドップラー流速計、超音波カメラ、水中カメラを装置に搭載している。ドップラー流速計で構造物近傍の流速を測定することで漏水箇所を見つけ出し、さらに超音波カメラと水中カメラで該当部の損傷状況を確認できる。移動装置の駆動系には、上下と前後に移動するためのスラスタ(推進装置)や、床面を走るためのフリッパとクローラを備え、水中での階段昇降も可能だ。移動速度は気中で毎秒30cmだが、水中の場合はやや遅くなり毎秒10cmほど。動態展示はなかったが、ビデオで水中を移動している映像が紹介されていた。
もう1点ユニークだったのが、イクシスリサーチのワイヤ吊り下げ型目視点検ロボット「Rope Stroller」だ。これは橋梁など、通常では立ち入り検査が難しいシーンで活躍するロボットだ。2本のワイヤを架設し、そこを移動しながらカメラで遠隔からモニタリングする。風の影響でワイヤーやカメラが揺れないように、6軸の姿勢センサーと機械的なジンバル構造を採用して揺動を制御する工夫も凝らしていた。今後、高速道路や橋などの社会インフラがどんどん老朽化していくことが予想され、このようなモビリティ性のある特殊な点検装置の活躍が大いに期待されるだろう。
このほか、トヨタ自動車が開発した搭乗型生活支援ロボット「Winglet」によるデモも行なわれていた(写真4)。こちらはセグウェイのように体重移動によって前後左右に移動できるパーソナルモビリティで、リンク機能による旋回も可能。NEDOでは、Wingletが人と共存する環境で安全に走行するための仕様や運用ルールを明確化し、スマートシェアリングシステムの開発などに取り組んでいる。
また千葉工業大学 未来ロボット技術開発センターでは、先ごろ発表された小型高踏破性遠隔移動ロボット「櫻ニ號」(サクラニゴウ)などを展(写真5)。櫻ニ號は、東日本大震災時の福島第一原発事故で投入された災害対策用ロボット・Quinceの知見をベースに、新しく開発されたロボットだ。信頼性・耐久性・機動性の向上や、水中で稼動できる防水性、γカメラなど大規模で重量を有する計測器の搭載、ハンドリング作業への対応など、現場の要請に応えられる仕様に刷新したという。オプションのアーム部のトップに高輝度照明や広視野カメラを取り付け、高所や狭隘空間での情報収集が可能だ。さらに第2リンク部にはハンドグリッパを備え、ガレキ撤去やサンプル収集などの軽作業のほか、原子炉建屋内のドア開閉ににも対応する。





