






国際レスキューシステム研究機構、千葉工業大学、東北大学の3社は28日、千葉工業大学芝園キャンパスにて新型の閉鎖空間内探査(災害対応支援)ロボット『Quince』(クインス)の発表を行った。
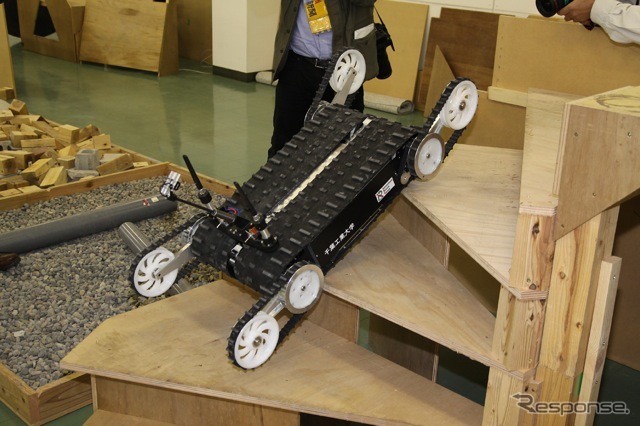
会見では、3機のQuinceによるデモンストレーションも実施され、災害現場を模した障害物や段差だらけのフィールドの踏破や、螺旋階段を含む坂路の登坂などのデモンストレーションも披露された。
Quinceは、CBRNE(Chemical Biological Radiological Nuclear Explosive:化学・生物・放射性物質・核・手製爆弾)災害の際に、消防などの隊員に代わって現場で先行しての状況調査・情報収集を行うことを目的とした、4脚のフリッパーを備えたクローラ走行型のロボット。NEDO(独立行政法人 新エネルギー・産業技術総合開発機構)戦略先端ロボット要素技術開発プロジェクトの一貫として、06年度より研究開発を行って来た成果として、今回披露された形だ。
特長としては、まず階段や瓦礫などを含む災害空間における高い走行性能、災害空間での活動や汚染物質除去に不可欠な防塵防水機能、予期せぬ落下時でも機能を維持できる耐久性(2mから落下しても問題なし)などがある。さらに、物体や空間の3次元形状の計測や映像・音声情報のマッピング、複数台のQuinceを連携させて情報の統合と記録が行えたり、災害の種類や被害状況に応じて基本機能にオプション機能を選択してミッション内容に合わせられたりする仕組みなどもポイントだ。
Quinceは、米国テキサス州の災害実験場の「Disaster City」での試験も行っており、約40m四方のコンクリート瓦礫エリアを端から端まで踏破し、また約10mの木造瓦礫エリアも踏破。斜面の横断なども余裕でこなしている。国内の大規模振動台「E-Defense」実験においては、振動台の上で倒壊した3階建ての軸組構法住宅の中に進入させ、倒壊した屋根構造上を走破したりしている。
その不整地踏破能力の高さの理由のひとつが、半自立操縦支援システムを搭載していること。従来のマニュアル操作では、立ちふさがる瓦礫を乗り越えたりするような場合は、Quinceの前部にあるフリッパーの角度をがれきの大きさに合わせた角度で上向きにするなど、頻繁に細かい操作をする必要があった。しかも、モニター越しに行なう必要があり、テストではオペレーターが操縦に手一杯で、要救助者を見落としてしまうような本末転倒の事態もままあったという。
それを、センサを用いてロボット自身が地形を把握し、フリッパーを適切な角度に自動設定するようにしたのが、半自立操縦支援システムである。これにより、遠隔地のオペレーターは前進の指示をするだけで細かい操作をする必要がなくなり、より周辺の様子により気を配れるようになったというわけだ。
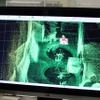
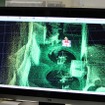
また、来場していた習志野市消防局の隊員らは、個人的な感想ということだが、レーザー測距センサによる3次元マップ作成機能が非常に頼もしいと語った。夜間の建築物内や地下での消防活動などは、目の前の自分の手すら見えないような真っ暗闇の状況もあるそうで、最初に情報収集して瓦礫の散在状況や要救助者の位置などを3次元マップで確認できるのは、隊員の二次被害を防いだり、効率よく救助活動を行ったりするのに役に立つだろうということであった。
今後の予定としては、これまでさまざまなロボットで開発してきた機能をQuinceにも順次搭載し、全国の消防との協力の下、今年度末には実際に配備を可能にするとしている。また性能試験として、6月19 - 25日にシンガポールで開催されるロボカップ世界大会のレスキューロボット部門に出場するほか、米国のDisaster Cityで開催される予定(会期未定)のNIST/ASTM災害対応ロボット訓練大会で、米国災害対応庁隊員による評価も受けるとした。