







昨年は日本のITSにおいて、ひとつの節目だった。国土交通省と国内14メーカーによるASV(先進安全自動車)計画第3期が終了し、公開実験という形で「ぶつからないクルマ」の実車が公開された。
ASV-3の実験では外部通信インフラを活用するという点で各社共通であったが、そこに対するスタンスではメーカーごとに違いがでた。その中でも特徴的だったのが日産自動車であり、同社は市販車をベースに実験車両とは思えないほど完成度の高い「ぶつからないクルマ」を実現。普及に対して具体的なビジョンを語っていた。
日産は、クルマの安全にとっての外部通信インフラにどのような視点を持つのか。レスポンス=SSK共催セミナーに先立ち、日産自動車 先行車両開発本部IT&ITS開発部 主管の福島正夫氏に話を聞いた。
--- これまでクルマの先進安全は通信をしない「自立型」を中心に進展しました。その中で日産では、外部通信の必要性や可能性について、どのように考えていますか。
福島 自動車メーカーはこれまで事故低減に向けた努力をしてきており、その中で最新の技術が(センサーとコンピューターの走行支援を使う)自立型先進安全と呼ばれるものです。しかし、自立型にも弱点があります。
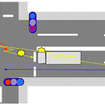
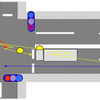
自立型は(センサーの検知範囲外で)相手が見えないと危険がわからないのです。例えば、交差点で建物の影にいるクルマや人はセンサーで捕捉できませんし、脇道から飛び出すクルマも対処できません。
こういった「センサーで検知できない領域」の状況を把握し、危険を避けるためにどうするか。それを合理的に考えると、外部通信を使うということになります。
--- 自立型先進安全の「次」として、外部通信を使ったインフラ協調型先進安全を据える。これは日産に限らず、国内外の自動車メーカーの共通認識になっています。その中で、昨年のASV-3で日産が特徴的だと感じたのが、「今あるインフラや技術をできるだけ使う」というスタンスです。
福島 私たち(日産)では事故をゼロにしていくという目標値を設定しています。しかし、今から新しい通信技術やインフラ構築など方策を議論していくと、普及フェイズに入れないし、事故低減が進まない。(新技術やインフラの議論をするより)今あるものを活用して、事故低減の取り組みを早くやらなければならないと考えています。
--- それだけ交通事故ゼロへのプレッシャーは強い、と。
福島 その通りです。今後、数年から数十年先に向けていい技術を作るという考えもわかるのですけれども、今ある技術で使えるものもあるならば、(段階的にでも)やればいいじゃないか。そう考えています。
| “つながるクルマ”本命インフラ議論 | |
| 詳細 申し込み | |
| 日時 | 2006年2月6日(月) 午前10時30分−午後6時 |
| 会場 | 東京コンファレンスセンター品川 |
| 公開ディスカッション | |
| 日産自動車 先行車両開発本部IT&ITS開発部 主管 | |
| 福島正夫 氏 | |
| 本田技研工業 インターナビ推進室 室長 | |
| 今井武 氏 | |
| ウィルコム 執行役員 ソリューション営業本部長 | |
| 瀧澤隆 氏 | |
| ITS事業企画 取締役社長 | |
| 小池建四郎 氏 | |
| 通信・ITSジャーナリスト | |
| 神尾寿 氏 | |











![日産『キャシュカイ』改良新型...日本のテイストを取り入れたデザインに[詳細画像]](/imgs/sq_l1/2005588.jpg)













