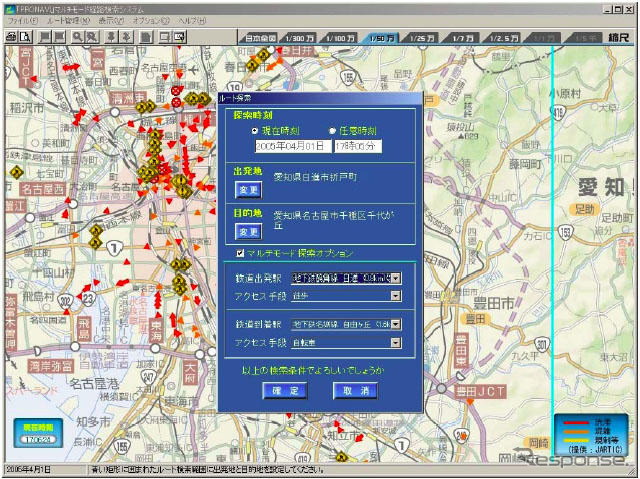

名古屋の産学官連携組織、P-DRGS コンソーシアム(http://www.p-drgs.com/)が研究開発中の動的経路案内システム『PRONAVI』が、開催中の愛知万博期間に合わせ、大規模モニター実証実験を6月から名古屋市周辺で開始する。
PRONAVIは、変化する交通状況に応じて最適な経路を提供する動的経路案内システム(DRGS)を用いる。走行中のクルマからの情報を集めて、交通渋滞を予測する研究だ。また、クルマを降りてからの道案内と連携した総合交通サービスの提供を目指す。
すでに一部のカーナビは、リアルタイムで主要幹線道路の渋滞情報を提供しているVICS の情報を用いて、案内中の経路で渋滞が発生した場合に経路の再検索を行う機能を備える。
PRONAVIがこれと異なるのは、過去および現在のプローブカー(各種センサーを搭載したクルマ)情報を活用し、変化する所要時間の「予測値」に基づいて経路案内を行なうこと。
路側情報を元とするVICS データなどの既存道路渋滞データを補完し、より精度の高い予測機能を発揮することが可能になった。
今回の実験の目的は、センターシステムの安定性確認およびPRONAVI ユーザビリティの検証など。実験期間は6月1日−9月25日で、期間延長も検討中だ。モニター数は1000 人を予定し、実験開始にさきだって5月25日までモニターを募集している(http://www.p-drgs.civil.nagoya-u.ac.jp/pronavi/)。