ダイナミックマッププラットフォーム株式会社(本社: 東京都渋谷区、代表取締役社長CEO: 吉村 修一、以下「当社」)は、令和7年度総務省事業「新東名高速道路の一部区間における自動運転レベル4※1トラック実証と連携した V2N 通信を用いたユースケース実証に関する検討」(以下「本事業」)へ参画いたします。
[画像1: https://prcdn.freetls.fastly.net/release_image/63188/112/63188-112-de69c1d39c2a6c0b4b6ff741b140b7f4-650x168.jpg?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
本事業の対象区間: 新東名高速道路 駿河湾沼津SA~浜松SA(約100km)
政府では、「デジタルライフライン全国総合整備計画」、「モビリティ・ロードマップ2024」等に基づき、自動運転車両と通信インフラの高度な連携を目指しているところ、本事業は、特にV2N※2通信の有効性を公道で実証・評価することを目的としています。本事業では新東名高速道路の一部区間を走行する自動運転車両に対して、V2N通信を用いて、「先読み情報※3」および「車両の遠隔監視※4」を提供する実証実験を行います。
その中で当社は、ダイナミックマップデータを受信して可視化するアプリケーションの構築、実証および有効性評価を実施します。ダイナミックマップデータは、当社が有する高精度3次元地図データと安心・安全な自動運転をサポートするための様々な情報を重ね合わせたもので、先読み情報も含まれます。本事業では、先読み情報をV2Nの通信環境下で自動運転に必要なサービスレベルで安定して送信可能かどうかを検証します。
当社は本事業を通じて、ダイナミックマップデータ提供による新たな付加価値の創出を目指すとともに、V2N通信の社会実装を加速させ、自動運転レベル4の早期実現に貢献します。
[画像2: https://prcdn.freetls.fastly.net/release_image/63188/112/63188-112-d579a3aaaa56e6e4497b2b1587798c2c-635x310.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
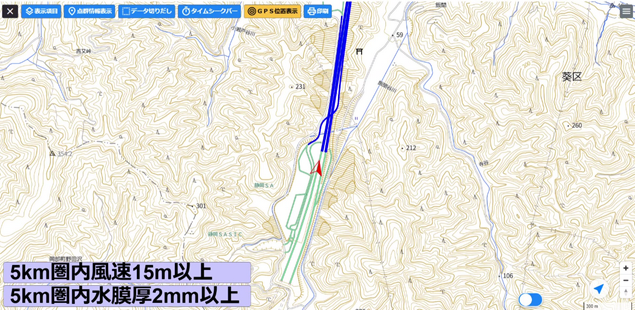
本事業で提供するアプリケーションによる先読み情報の表示イメージ
なお、本事業に関しては株式会社三菱総合研究所を筆頭に、2025年6月26日に連名で発表したプレスリリースでもご案内しております。
- 総務省「新東名高速道路の一部区間における自動運転レベル4トラック実証と連携したV2N通信を用いたユースケース実証に関する検討事業」を受託https://www.mri.co.jp/news/press/20250626.html
※1自動運転レベル4: 場所・天候・速度等の特定条件下において、自動運転システムがすべての運転操作を実施
※2 V2N: Vehicle to Network /携帯電話網を用い、車両とインターネットやクラウド等通信ネットワークとの間で情報をやり取りする技術
※3先読み情報: 車両が走行予定の箇所の道路状況や交通イベント情報
※4遠隔監視: 車両の運行状態を遠隔地からリアルタイムでモニタリングし、異常時には適切な対応を支援するシステム
<ダイナミックマッププラットフォーム株式会社について>
当社は日本政府によるバックアップのもと、国内自動車メーカー10社等の出資により設立されました。日本をヘッドクオーターに、北米・欧州・中東・韓国に拠点を持ち、26ヶ国で事業を展開しています。
現実の世界をデジタル空間に複製する高精度3次元データのプラットフォーマーとして、様々な産業分野におけるイノベーションを支えています。
設立: 2016年6月
本社: 東京都渋谷区
代表者: 吉村 修一
事業内容: 自動運転・ADASをはじめ多様な産業を対象とした高精度3次元データの提供
URL: https://www.dynamic-maps.co.jp/
プレスリリース提供:PR TIMES