
日立オートモティブシステムズは、クラリオンと共同開発した各種センサーを市販車に搭載し、2016年12月から2017年3月にかけて、自動車安全運転センター 安全運転中央研修所(茨城県ひたちなか市)の模擬市街路で実証試験を実施した。
自動走行の実現には、単一センサーでは得られない、より高度な認識機能が必要となる。そのため、日立オートモティブシステムズは、ステレオカメラをはじめ、前・後側方レーダー、前方遠距離レーダー、クラリオンの周辺監視カメラなど、複数のセンサーを組み合わせたセンサーフュージョン機能を装備することで、高度な認識機能を実現している。
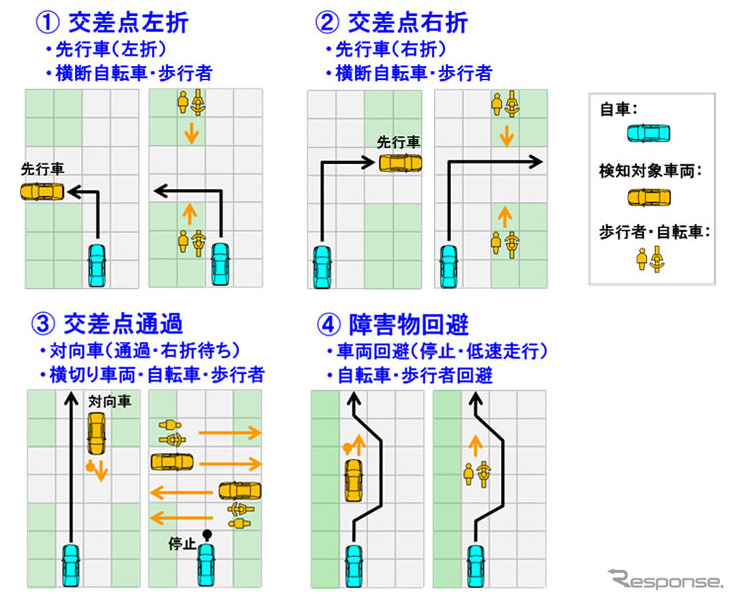
今回の実証試験では、「交差点左折時の先行車と横断中の自転車・歩行者の検知、認識」「交差点右折時の先行車と横断中の自転車・歩行者の検知、認識」「交差点通過時の通過または右折待ちをしている対向車、横切り車両、自転車・歩行者の検知、認識」「一般道走行時の路肩停止車両や低速走行車、および自転車・歩行者の検知、認識と回避走行」といった一般道における4件のユースケースを想定して実施した。
その結果、検知対象物の的確な認識が難しい交差点右左折時におけるセンサーフュージョン機能の課題を抽出。また、車線まで認識できる模擬市街路の高精度な地図を利用し、地図ユニットが出力する自車位置と方位の誤差が目標値内に収まっていることも確認した。
日立オートモティブシステムズは、今後も実証試験などによる評価検証を重ね、さらに高度な自動走行を実現する各種センサーの開発を加速していく。










![過疎地の「交通空白」、自動運転など活用で2029年までに“解消”…政府が目標明記へ[新聞ウォッチ]](/imgs/sq_m_l1/2222969.jpg)