



ゼネラルモーターズ(GM)は、2013年5月に「スーパークルーズ」という半自動運転のシステムを開発中であることを発表している。量産化および市場への投入は、2010年代後半を目指している。スーパークルーズは、カメラによる視覚情報やGPS情報などをベースにオートクルーズと車線維持機能を組み合わせて自動運転を可能にする。
GMでは、自動運転システムは安全性と現実性を考え、V2V、V2Iといったインフラ協調型ITS技術との連携、ドライバーと車とのコミュニケーション(ユーザーインターフェイス)を重視したものになるという。こう語るのはGMでアクティブセーフティ関連の技術開発に携わり、近年は次世代の安全技術に専念しているというJohn Capp氏だ。同社が自動運転技術に取り組む目的は、事故防止や安全対策、渋滞や省エネといった環境対策、そして、高齢者や障碍者にも安全に運転できる車を実現するためである。戦略の考え方は、自動運転は、アクティブセーフティの延長にあり、各種安全システムを集約したものが自動運転へとつながっていくとする。
最終的な自動運転達成、つまり、ドライバーは行先を指示するだけで運転操作をしないでも目的地まで運んでくれるような機能が現実のものになるのは、どれくらいの時間が必要かわからないとするが、ロードマップは考えているという。
そのロードマップでは、自動運転の段階を5つに分けて考えている。最初は、ドライバーに各種の情報を提供し、警告を与える段階(No Control)。次に緊急時や危険回避のため、機械やコンピュータの介入が入る段階(Limited Control)。ここまでが現在、商品レベルで実用化されている技術だ。次の段階は、雨天・夜間を除く高速道路上、制限されたエリア内といった特定の条件で可能な自動運転(Monitored Control)。さらに、市街地など複雑な状況で可能な自動運転(Transferred Contorl)となる。最終段階は、運転手付きの車に乗るのと同様な制御による自動運転(Chauffeured Driving)だ。
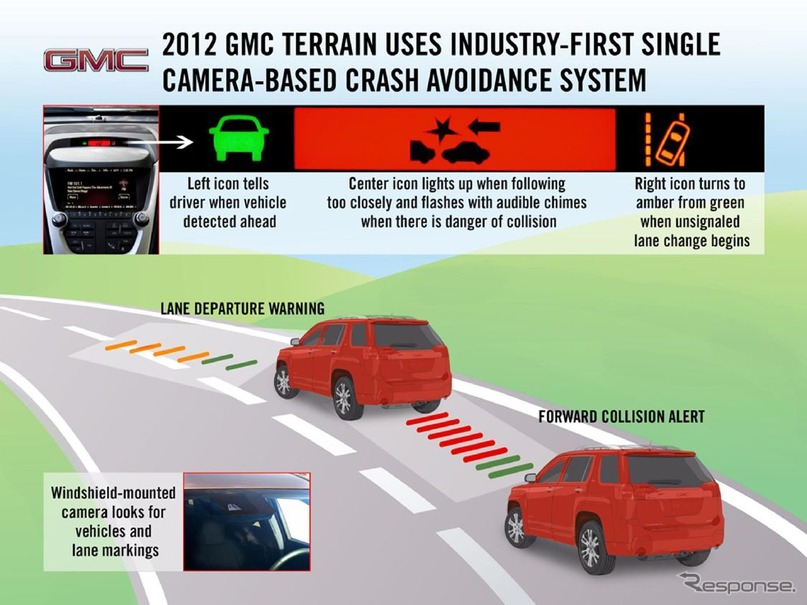
GMでは、2012年にテレイン向けにカメラ画像を使った、衝突および車線逸脱を警告するシステムや、キャデラックの自動ブレーキシステムなど、Limited Controlまでが実用化されているが、現在開発を進めているスーパークルーズでは、ドライバーがハンドルに手を添えないでも自動運転が可能なシステムを目指している。
まずは、交差点がなく歩行者がいない高速道路上での自動運転をめざし、自動運転が可能な速度は時速75マイル(高速道路の法定速度)とするそうだ。他者の車線維持の制御は、ハンドルに手を添えていないと(ドライバーが運転していないと)機能しないようになっている。これは、国によって法的な制限があるからでもあるが、GMはアメリカにおいては文字通り手離し運転が可能になるよう開発しているという。












