




1月15日、オートモーティブワールド2015専門セッション「最新ADASの先端要素技術とは」にてボッシュ アドバンストドライバーアシスタンス技術部部長千葉久氏が登壇した。講演タイトルは「ボッシュの自動運転への取り組み(The way towards Automated Driving)」。
冒頭で自動化とコネクティビティによって具体的にどのように社会的利便性が高められるかについては、渋滞緩和によって交通流通が80%改善されること、連携された交通の流れによって高速道路での燃費が23から39%向上すること、より高い効率性により一日あたり56分間他のことのために時間を活用できること(米国における調査より)が挙げられた。さらには今後ますます増加するシニア世代にも対応できる運転の提供、安全性の向上が利点として挙げられ、続いて自動運転の実現にむけて必要となる技術課題について詳説した。
◆将来的にはパッシブセーフティとアクティブセーフティの融合を図る
安全性を高めることに対してボッシュはどのようなビジョンを持っているのか。
「エアバック開発で培われたパッシブセーフティ技術、ADSやESCなどのアクティブセーフティ技術、さらにそこにレーダーやカメラなどのセンシングテクノロジーを加えたドライバーアシアスタンス技術を、世界中の自動車メーカーと共に世の中に広く普及することに貢献しつづけている」と話し、将来にわたっての安全技術開発のロードマップとして「パッシブセーフティ、アクティブセーフティ技術を融合させる形で2020年にはケガや事故のない社会を目指したい」(千葉氏)
2020年代後半以降には自動運転にさらなる快適性を求め、事故のない快適な運転・交通環境を提供していくサポートをしたい、という。
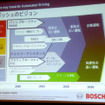
技術的なロードマップとしては、段階的な自動運転の開発を考えていることを強調しながら、その段階は横軸を自動化のレベル、縦軸にその機能が持つ利便性を表すグラフを示しながら説明。「自動化のレベルとその機能があがるとシステムの分担する範囲や自動運転が機能する時間の長さなど、ユーザにとっての利便性が高くなる。今後の技術開発のトレンドや市場での受け入れやすさを考えた場合自動運転は1高速道路または2駐車支援で使われる機能から市場へ投入されると考えている。これを足掛かりとして機能の向上や自動化の範囲を広げていくことになる」との見通しが立てられているという。
◆さらなる自動化に要するのは複数センサーとマップ
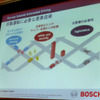
高速道路での自動運転に目を向けると、すでに実用化されている「アダプティブクルーズコントロール」や「車線維持機能」では、レーダーまたはカメラなど“単一のセンサー”で実現されている。しかし自動化のレベルをさらに上げた「インテグレートクルーズアシスト」「ハイウェイアシスト」などは複数のセンサー(レーダ・カメラ)を組み合わせて検知範囲を広げ、データの信頼性を高めることが要求される。
ここでの「インテグレートクルーズアシスト」とは、高速道路において車線内で横方向の制御を行いながら決められた速度で前走車との安全な車間距離を保ちながら走行する機能。さらには道路標識を認識して決められた制限速度に応じて速度設定できる機能などを持つもの。「ハイウェイアシスト」は「インテグレートクルーズアシスト」と比較した場合“ドライバーの意思を確認した後に”自動で車線変更できる機能が追加されている。その際前後の側方に装着されたセンサーで知覚等を検出し、安全な車線変更を行うことが必要となる。
また、さらに「ハイウェイパイロット」や「オートパイロット」のように自動化の進んだ機能を実現するためにはセンサーの組み合わせだけではなく“マップ”などのユーザの情報を活用してさらに信頼性を高めていかなければならないという。
◆コネクティビティを前提とした情報で高度な駐車支援が実現
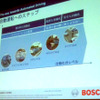
駐車支援機能では、現在欧州を中心に普及が始まっている、ステアリング操作のみでの自動化に加え、ブレーキを自動でかける機能を付け加えた“一部自動化された”機能の量産が今年始まる予定という。
これらの機能は“超音波センサー”を用いて実現化されており、今後普及が期待されるリモート駐車支援にむけてさらに開発が進められる領域なのだという。このリモート駐車支援は、ドライバーが車内にいなくても自動で駐車してくれる機能で、ドライバーはクルマの外で、スマートフォンなどを使って駐車操作を行う。
千葉氏はここで縦列駐車の支援機能のデモ動画を見せながら「ここでのリモート駐車支援のシステムでは駐車が終わるまでの間、あくまで“ドライバーの監視は必要”で、スマートフォンから万が一手が離れた場合には駐車をストップされる。さらに自動化のレベルが上がった場合の、ドライバーの監視の必要がない自動駐車には、カメラの捉えたセンサーの情報はもちろん、駐車場の地図や空きスペースなどコネクティビティを前提とした情報がさらに必要になる」と指摘した。
◆ドライバー監視にも活用されるサラウンドセンシング
続いて自動運転に必要な要素技術のひとつであるサラウンドセンシングについて言及。
ボッシュはサラウンドセンシング機能の向上にどのように取り組むかを語る。「刻一刻と変わる道路の重要性をモニタリングし、どのような状況にも適切な判断を下すことは自動運転には必要不可欠。天候の変化や、明るさの変化に対応した、さらにセンシングした情報を確かなモノにする必要がある」
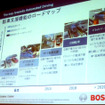
センシングとは具体的には「ミリ波レーダーやカメラ、超音波センサーを組み合わせ全方位をカバーすることができるセンシング」を指す。全方位はもちろん、精度の高い判断のためには、動的な測定、高さや奥行、幅、などを含めた三次元の情報が必要となるため、それぞれのセンサーの特徴を生かし、様々な道路状況に対応できるようなセンサーデータフュージョンを考えているという。そうすることでそれぞれのセンサーが苦手とする状況においても、自動運転を継続させることができる。
“それぞれのセンサーが苦手とする状況”とは、例えばカメラでは、人間でも困難に感じるような、逆光の状況がありうる。そのような状況でも目の前に迫りくる危険な状況を判断する必要がある。また、トンネルの出入り口やトンネルの中も同じ。
「トンネルの出入り口では明るさが急に変化するためにカメラにとって非常に難しい状況になる。カメラだけではなくレーダーにとっても、トンネルの入り口は非常に難しいケースである。このように、既存の単一のセンサーでは難しい状況を、既存のセンサーの組み合わせやセンサー性能の向上あるいは新しいセンサーの開発により信頼性の高い環境モデルを構築することがサラウンドセンシングに課せられた使命である」(千葉氏)
◆ドライバーのモニタリングも自動運転を実現する上で必要な要素の一つ
よそ見運転や居眠りを検知したり、運転者の健康状態をチェックすることも重要なポイントのひとつ。自動運転をさらに快適なものにするためには例えば運転者を認識して運転者の状態や好みに合わせた制御の実現が必要になるかもしれない。また自動運転システムはドライバーの状態をモニタリングすることでドライバーにいつでも制御を戻すようにしなくてはならない。さらに“ドライバーが制御できない”と判断した場合に安全にクルマを停止させるセーフストップという機能が作動するよう設定することも必要となるという。
◆自動運転運用の際は“フェイルセーフ”からの脱却を
最後に自動運転におけるマップ情報の持つ意義について説明した。
「まず運転ルートを決定するために広い範囲のマップが必要となる。センサーが検知できる範囲の、外の情報を取得することで非常に早い段階で道路状況に対応したルート選択や運転方法を選択することができる。次に自己位置を認識するために高い精度のマップが必要とされる。どの車線のどの位置を走っているのかを知ることで安全で快適な制御を行うことが可能となる。さらには次のアクションを適切に決定するために、車線の情報も非常に重要。なぜなら車線数が減少している状況に対して事前に車線変更しなければならないからだ。このように人間が普段自然に行っている意思決定や更新変更、それに伴う運転変更を今後自動で行うためにマップ情報が必要不可欠となる」(千葉氏)
では自動運転に必要とされるマップはどのように提供されて使われていくのか。マップは大きく三つの部分にわけて提供、生成されるという。1つめは現在でも広く用いられているデジタルマップ、2つ目は自動運転用に正確な位置決めがおこなわれるための位置情報マップ、3つめは動的に変化するような交通情報などの地域の情報、走行している道での速度制限や道路状況に関する情報マップにわけられるという。これらの情報を集約してクラウド経由で統合、配信され、常に最新の情報が自動運転に用いられることが今後必要不可欠だという。
千葉氏は自動運転に必要な要素技術をした上で、さらにこれらの技術を統合して運用していくためのシステムの基本的な考え方について概説した。これまで自動車はそれぞれのセンサーやアクチュエータが失陥することを想定しながらいわば“フェイルセーフ”の考え方でシステムが構築されてきたが、今後自動運転を実現していくためにはそれらの備品に失陥がおこった場合にもドライバーを危険にさらすことなく車両を安全にとめる、システムの一部機能を縮小させても稼働させ続ける考え方も必要となるという。
「センシング、アクチュエータ、ネット環境にも何らかの冗長性が必要で。これらの要求を実現するようなさらに高度で複雑なシステムの構築が必要とされていく」(千葉氏)