







自動車メーカー各社は、2020年前後をメドに、高速道路など特定の道路環境において自動運転の技術を市販車に実装させるロードマップを明らかにしている。
一例を挙げると、8月には日産がEV『リーフ』をベースに試作車を、10月にはトヨタが「高速道路における高度運転支援技術」を公開。ボルボやGM、BMWなどといった欧米の各社も、急ピッチで技術開発を進めている只中だ。
さて、この自動運転の実用化には、各種センサーやカメラなどの自律系システムの認知精度向上も不可欠だが、もうひとつキーテクノロジーとなりうるのが「地図データ」とのマッチング技術だ。今回、福岡県北九州市のゼンリン本社を訪れ地図製作現場を取材。自動運転をサポートする高精度地図開発の最前線をレポートする。
◆来たる2020年、自動運転に『高精度地図データ』が必要な理由
そもそも自動運転を可能とするには何が必要なのか。
コア技術とされているものには、いわゆる『ADAS(先進運転支援システム)』がある。主にクルマが“ぶつからない”ようにするための技術だ。さらに、この“ぶつからない”技術を機能させるために必要と考えられるのが「道路のどこに障害物(標識・電柱・植え込みなど)があるか」に関するデータだ。
「この道路データと自動車に搭載されたセンサーとの情報を照合させることで、自車に衝突する危険性を注意喚起し、安全性を担保した自動運転が実現できるのではないか」。ゼンリンの第二事業本部第二事業戦略室の藤尾秀樹氏は、自動車メーカーや部品メーカーに対し、このように提案し開発を進めているという。
ただ、道路上にある障害物の有無はクルマに搭載されるレーダーやカメラでも取得可能だ。それなのになぜゼンリンはデータ提供の必要性を説くのか。
その理由について、藤尾氏は次のように説明する。「運転しながら刻々と変わる膨大な道路環境情報を集積・解析することは、クルマのシステムに負荷をかけ余分なコストとなる。したがってあらかじめ道路、レーン、標識、信号などに関する情報をクルマにインプットしておけば“運転に必要な”情報処理に集中できるようになる。つまりクルマのシステム負荷軽減に利点がある」。
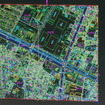
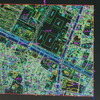
ゼンリンが現在開発を進めている自動運転機能に向けた地図は『高精度地図データ』と呼ばれ、街を実際に撮影した画像とレーザーで取得した点群情報をあわせることで、文字通り非常に優れた精度を実現しているという。点群情報は正確な位置把握に長けるが、たとえば標識の文字・車両で隠れてしまう部分などは画像から得られる情報で補う必要があるのだという。
◆正確な位置把握でできること 急カーブや合流地点をいち早く知らせる
ただ、これだけで安全な自動運転ができるとはいえない。
なぜなら特定の地点の道路情報をあつめても、クルマがどこを走っているかを把握しなければ提供しようがないからだ。
その点、クルマの位置把握についてゼンリンはGPSやジャイロの狂いで生じてしまうような誤差をも補正する正確さを実現できているという。「これを可能にしたのは、レーザーが探知した分離帯ブロックやガードレールなどからの距離を、地図上の車線中心線や道路境界線との距離と照らし合わせることで走行レーンを特定する方法だ」(藤尾氏)。
わかりにくい急カーブ・みえにくい合流地点を事前に知らせ、減速をうながすなど、『高精度地図データ』が安全のためにできることはさまざまで、すでに一部の機能は実用化されている。自動運転の実現に向け、一般道に比べ情報の少ない高速道路を優先し高精度地図の整備が進められている。
また、ゼンリンがもつデータは道路上の障害物にかぎらない。さらにデータ活用も色んな形でされる。たとえば同社グループのジオ技術研究所は、はゼンリンが蓄積してきた2次元データを元に新しい“3次元”地図を開発している。
◆強みは更新の新しさと提供の速さ
3次元地図はゼンリン子会社のジオ技術研究所が開発しているモノで、『ウォークアイマップ(WalkeyeMap)』と呼ばれる。
同社管理部の三毛陽一郎氏によると、「他社は都市によっては2年に一度の更新なのに対し、かならず1年に一度更新する鮮度の高さ、自社にデータがそろっている分、顧客を待たせる時間が短く当日もしくは翌日には提供できる早さ。これらがゼンリングループならではの強み」と説明。
3次元であることに加え建物壁面の模様や質感までリアルに再現できる点もウォークアイマップの優れた特長とのこと。このリアル感は景観・建築シュミレーション等に活かされているという。
◆面倒だった縮尺きりかえ 一望ナビ『WAREM』では不要に
さらに『WAREM(ワレム)』と呼ばれる3Dレンダリングミドルウェアもジオ技術研究所の独自技術による成果物の一つだ。『WAREM』の特徴は複数の縮尺を一画面でみられること。これによってこれまでのように縮尺をかえるために画面の切り替えをしなくてもよくなる。
これは従来の描画の常識を覆したことで実現した。従来地図描画では垂直投影が主だった。そのため近くから見ようとすると狭い範囲しかみえず、目線を遠ざけて広い範囲をみようとすると大雑把な地図になってしまっていた。しかし『WAREM』のモードは、地面にむかって“斜め”から下をみる。これによって人の平均的な目線から「東京都内から富士山がみえる高さ」まで、自在に視点を設定しながら市街地約100kmを一画面でみることが可能となった。
◆「駅にはついたがどのビルかわからない 」…悩みにこたえビル名・郵便局など街の情報を最適化
そして『Pegasus eye Map for AR』は地図情報を“省いた”ことを特徴としている。コンビニ、郵便局をアイコンで表示。わかりにくいビル名を景色に重ねて表示してくれる地図だ。ここで工夫したのは情報をはやく絞り込むためにあらかじめ決められた間隔で事前に情報を最適化したこと。これにより実現した表示の高速さに同研究所の強みがある、という。
『Pegasus eye Map for AR(ペガサスアイマップ)』はゼンリンの3次元デジタル地図の立体版。まち並みや雰囲気がつたわる点に利点がある。3Dだと出来てしまっていた高いビルの“死角”。視点を回転させる工夫を凝らしすべて見渡せるようにしている。
◆地図の精度を底支えする現地スタッフ、開通日から利用可能なデータベース
ここで紹介した『高精度地図データ』『ウォークアイマップ(WalkeyeMap)』『WAREM』『Pegasus eye Map for AR』『Pegasus sys Map for 3D』、これらはいずれも現地で収集した情報、そして集められた情報をデータベースにする独自システムの双方があってできるものだ。
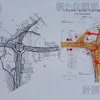
現地調査に関して言えば、これほど技術が発達してもやはり“図面からは読み取れない情報”はあるという。描画されている道路が最終形状かどうか、信号機の設置状況など紙の調査用原稿を介したやりとりは依然として不可欠な作業として残っている。
道路が変更される場合も対応はかなり複雑だ。高速道路開通時などはより入念になる。まだ完成していない時点で調査スタッフが“すこしでも正確な情報をもとめ”完成後の道路形状、高さ、料金所の位置を取材する。こうして道路開通日から利用可能なデータができあがることになる。
ひとくちで電子地図と言っても、そこには現地調査の労力とコスト、これまで築き上げてきたノウハウと技術力がその背景にはある。ことナビゲーションの分野ではAppleやGoogleが日本市場への食い込みに苦戦している理由には、“高精度地図への徹底したこだわり”の差と言えるかもしれない。






















![「ツイーター」だけを追加 or 交換するのもアリ! さらには…?[お金をかけずにサウンドアップ]](/imgs/sq_m_l1/2168658.jpg)
