


国土交通省は29日、自動車の自動運転であるオートパイロットシステムに関する検討会(座長:朝倉康夫東工大大学院教授)第2回会合に、コンセプト案の概略整理案を提示した。
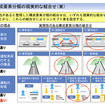
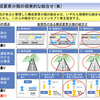
それによると、自動車の走行形態については「追随走行」と「隊列走行」とし、自動運転車両が走行する道路構造では「専用車線」と「一般車線」の実現性が高いと整理した。さらに、自動運転の運用形態としては、ドライバー関与のあり方への影響や運用形態の普及可能性などから「運行事業者等の委託先が責任を負う」の実現可能性が高いと判断した。
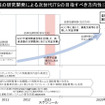
運行事業者等が運行する先行車両(先頭車両)に追随して走行したり、複数車両が隊列を組んで走行することを想定したもので、今後はコンセプト案ごとの課題を整理してコンセプトを選定し、実現に必要な検討事項を整理して来年3月頃を目途に中間とりまとめを行う。
会議の冒頭あいさつした国交省の津川祥吾政務官は「自動運転は新たな交通文化の創出であり、海外ではまだ方向性を見いだせていないため、日本がリードできるチャンスだ。来年10月に東京で開かれるITS世界会議で大きなメッセージを発信したい」と意欲を示した。








![過疎地や観光周遊のための自動運転モビリティ、群馬大学が実験…ITSフォーラム2018福岡[動画]](/imgs/sq_m_l1/1304032.jpg)








