





東日本大震災で原発事故が起こってから、人間が入れない危険な場所で活躍するロボットの存在が注目されている。ホンダ『ASIMO』も原発事故の修復に役立てられないのか、という問い合わせがホンダに集まったことが話題になったこともある。
ASIMOは強い放射線下の環境で動くことを想定していないし、瓦礫だらけの発電所内で複雑な作業をこなせるようには出来ていないから、実際に原発の事故処理にあたるのは不可能だ。
しかしホンダは、手をこまねいている訳ではなかった。どのようなロボットが必要とされているか東京電力に尋ねると、現場で作業員の代わりにバルブの開閉などが行なえるロボットが欲しいという回答を得た。
そんなリクエストに対し、これまでのASIMO開発で培った技術で、貢献できるロボットを作り上げていたのだ。それが、ロボティクス発表会で披露された作業用アームロボットだった。
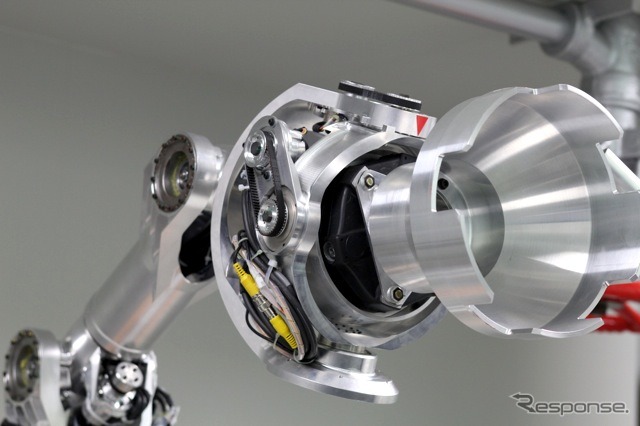
骨格部分の材質は見る限りアルミ合金の削り出しで、そこにモーターやギア、歯付きベルトやハーネス類が組み付けられている。これはASIMOの腕とほぼ同等のメカニズムが用いられているという。異なるのは腕の大きさと、腕の先端が5本の手指ではなくアタッチメントを取り換えることによって柔軟に対応できるようになっていること。各関節はモーターを組み込みシステムによって制御している。つまりほぼ各モーターごとにマイコンによる制御が行なわれていると思っていい。
ちなみにASIMOの場合、全身に57個のモーターを使っているから、それぞれにマイコンを使った組み込み制御が行なわれているようだ。
ASIMOと違い、このアームは動かし方としては単純にリモコンのロボットアームというべきモノで、産業ロボットのように自動化された動きではない。けれども個々の関節を独立して動かすだけでなく、連携して動かすことでアームの先端を対象物に近付けたまま、アーム全体の位置関係を修正できるような芸当も見せてくれた。
これによってロボットアームを支える土台や、回すバルブがある配管側がグラついても、安定した作業が行なえるような制御が可能になっているのだ。
すでに東京電力にこのロボットは提供されており、東電の研究所で投入に向けたテストが行なわれているという。









![ホンダ元社長吉野浩行さんのお別れの会、“同僚”ASIMOもお見送り[新聞ウォッチ]](/imgs/sq_l1/1763678.jpg)
![ホンダの人型ロボットASIMO、“定年延長”認められず退職へ[新聞ウォッチ]](/imgs/sq_m_l1/1721379.jpg)
![消える“ホンダらしさ”、人気アイドル『アシモ』も引退[新聞ウォッチ]](/imgs/sq_m_l1/1317259.jpg)
![自工会、再びトヨタ体制へ、新会長に佐藤社長が就任[新聞ウォッチ]](/imgs/sq_l1/2169567.jpg)
