


ゼンリンとMobility Technologies(MoT)は4月22日、地図情報のメンテナンス効率化に向け、道路情報の自動差分抽出を共同開発することで合意したと発表した。
ゼンリンは、各種情報を収集・管理し、さまざまな情報を紐付ける空間情報におけるプラットフォームとして、位置情報ソリューションを提供している。一方、MoTはタクシーをはじめとするモビリティ関連事業を展開。次世代事業部では、走行車両から得られる映像データを機械学習により自動でデータ化し、新たな価値創出を目指す研究開発を行っている。
道路の建設や交通標識の新設・変更、路面ペイントや信号機の情報等、道路情報は日々刻々と変化している。今回、両社が持つアセットを掛け合わせ、安心・安全で便利な交通社会の実現に求められる高鮮度な地図情報のメンテナンスのために、道路情報の自動差分抽出の共同開発に着手する。
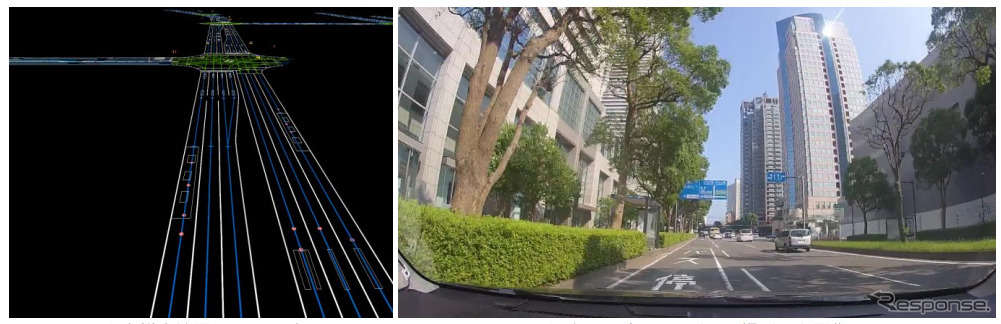
具体的には、MoTが日々運行を行うタクシーやトラックに設置されたドライブレコーダーから映像データを取得し、既存の地図情報と実際の道路情報の差分を機械学習により自動で抽出。この変化情報をゼンリンにて活用し、時空間データベースとして逐次メンテナンスを行い、高鮮度な地図情報を提供する。
両社は今後、幅広い分野で連携を強化し、安心・安全で便利な交通社会の実現に貢献していく。








