





熊谷組は4月4日、SOINNと共同で、AI(人口知能)制御で不整地運搬車を自動で走行させる「不整地運搬車(クローラキャリア)の自動走行技術」を開発したと発表した。
開発したAI制御技術は、教示運転に基づく単独の不整地運搬車に対する自動走行技術と、AIによる制御を組み合わせた制御技術で、2台以上の車両のスムーズな運行と、パソコンによる人の介在を少なくする省人化が可能となる。
複数台の不整地運搬車が繰り返し自動走行する際、衝突しないよう安全な運行を制御させるため、従来は土砂積載の遠隔操作オペレーターのほかに、衝突等の安全確認を行いながらクローラキャリアの自走走行を行うオペレーター1人が必要だった。AI制御によって衝突の監視作業が不要となるため、土砂積載から土砂搬出までの一連の作業がオペレーター1人で可能となる。
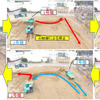
不整地運搬車の自動走行技術は、最初に不整地運搬車のオペレーター運転席から離れた場所(操作室)で、走行状況をカメラ映像で確認しながら土砂積載場所から搬出場所まで遠隔で操作し、操作内容をコンピュータに記憶させて不整地運搬車を自動走行させる。
同社では、阿蘇大橋地区斜面対策工事における土砂運搬の実施工に、この技術を導入し、AIによる効果を確認した。
今後はAI制御技術をさらに向上させるとともに、安全面や運用方法を検討して本格的な実運用に向けて準備を進める。





