

宇宙航空研究開発機構(JAXA)は、国際宇宙ステーション(ISS)「きぼう」日本実験棟 船外実験プラットフォームのポート共有実験装置(MCE)ミッションの1つ「EVA支援ロボット実証実験(REX-J)」について、計画していた全ての実験を終了した。
REX-Jは、宇宙飛行士の船外活動(EVA)を支援・代行するロボットの実現を目指し、同ロボットの実現に不可欠な「空間移動技術」を実証実験するミッション。2012年7月21日(日本標準時)に種子島宇宙センターから「こうのとり」3号機/H-IIBロケット3号機によって打ち上げ、同年8月に初期機能確認を実施、同年10月に本格的な実験運用を開始した。
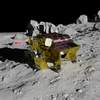
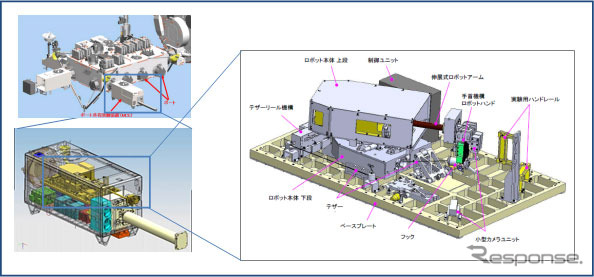
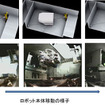
これまでの実験によって、ロボットの基本機能動作など予定された全ての計画を終了し、世界初となる3つのロボット技術について実証に成功した。具体的には、伸展式ロボットアーム動作の宇宙実証、テザーを用いたロボット移動の宇宙実証(曝露環境下)、伸展式ロボットアームとテザーを用いた、ロボット移動の宇宙実証の3つ。
実験で得られた成果については、今後の有人宇宙活動支援ロボットや大型構造物の組立保守ロボットなどの宇宙作業ロボットへの活用を進める。これによって宇宙飛行士に代わって、または、支援しながら目的の作業を行う「有人宇宙活動支援ロボット」の実現を目指す。