ITS世界会議で講演を行うため、GMからElectrical & Countrols System Research LabのDirectorであるJohn Capp氏が来日し、14日に記者を囲んだラウンドテーブルが実施された。その中から、GMの自動運転の考え方やITS戦略についてまとめてみたい。
◆1950年代を起源とする自動運転の歴史
GMは、カーネギーメロン大学(CMU)と共同開発した自動運転カーが、2007年のDARPA Grand Challenge(以前はURBAN Challengeの名称で開催されていたもの)で優勝しているように、自動運手技術にも力を入れているメーカーのひとつだ。Capp氏によると、GMの自動運転技術の歴史は古く1950年代までさかのぼることができるという。当時、コンセプトカーとして開発された車は「サイクロン」と呼ばれ、ボディ下面に磁気センサーを内蔵し、道路上に埋め込まれたメタルを検知するものだが、フロントには2基のレーダーユニットを搭載しており、現在の自動運転のアイデアや基本的な考え方はこのころから確立されていた。
GMの自動運転技術の歴史の中で大きなステップとなったのは、やはりDARPA Challengeだそうだ。CMUチームが優勝した2007年は、南カリフォルニアの空軍基地を利用して、市街地を模したコースおよそ100kmで競技が行われた。参加チームは89で、決勝には11チームが臨んだ。CMUとGMが共同開発した「Boss」(ベース車両はTahoe)は4時間余りで1位でフィニッシュした。Capp氏は「この取り組みは、自動運転が可能であることを証明したことに大きな意義があった。しかし、実用化という意味では課題もまだまだ多い」という。
◆技術、社会面での課題解決には時間を要する
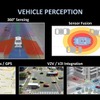
技術的な問題は、まずセンサー技術だ。いかに精度の高いセンシングをリーズナブルなコストで実現するか、そして複数のセンサーを統合する技術や制御アルゴリズムの開発も重要である。機械の介入をどこまで行うか、どこまで人間にまかせるか、といったクリティカルな制御も欠かせない。GPSの精度も将来的にはセンチメートル単位まで上げる必要があるという。
Capp氏はさらに、「自動運転技術をつきつめていくと、法律や社会インフラ、社会システムの問題につきあたる」という。最終的な自動運転にはV2V、V2Iといったインフラ協調が欠かせないうえ、自動運転の責任をメーカー、行政、ドライバーとどう切り分けるのか、法的な整備を含んだ社会的な問題は、避けて通れないという認識だ。とくにアメリカでは、州ごとに道路行政や法律が異なるので、自動運転技術の実用化に対するハードルにもなっている。
インフラ協調型のITSを重視という点では、日米欧でそれが自動運転技術の発展や浸透に欠かせない要素であることに違いはないそうだ。GMでもインフラ協調型の自動運転技術が実用化の前提となっている。しかし、自動運転の目的には欧米で違いがあるようだ。Capp氏によれば、米国は衝突回避など安全性確保のためのセーフティアプリケーションとしてのITSや自動運転があり、渋滞緩和や省エネ環境対策はその次となるが、EUでは環境対策や渋滞緩和のためのITS・自動運転があり、安全対策はその次だという。日本は、どちらの目的も同じレベルといえるが、加えて経済政策(産業の活性化や雇用促進)といった側面があることが特徴だろう。
いずれにせよ、自動運転には、技術的問題、社会システム上の問題の他、利用者側の認知や理解が進み共通認識を醸成していく必要もあり、時間が必要である。Capp氏は「搭乗者がなにもしないでも良い完全自動化の道のりはまだ長いと思われる。現状でいつ実現できるかの予想は困難だ」と語っていた。